![]()
2017/7/18 ものづくりニュース
【状態監視モニタ】vol.5 伸び差モニタ(その1)
前回の偏心計測と同様、今回もTSI(タービン監視計器)特有の監視項目の1つである、蒸気タービンのロータとケーシングの相対的な伸びの差である「伸び差」の計測に関して説明します。
伸び差計測とは
タービンロータはスラストベアリングでケーシングに対して軸方向の動きが固定されていますが、スラストベアリングから離れた場所では、タービンロータとケーシングの熱容量の差により、起動後の温度上昇ともにロータとケーシングの伸び量に差が生じ、その差は時間とともに変化します。
このロータとケーシングの相対的な伸びの差を「伸び差」と呼びます。
タービン起動中だけでなく、タービンの停止過程から停止後にかけての温度降下時においても伸び差は変化することになります。
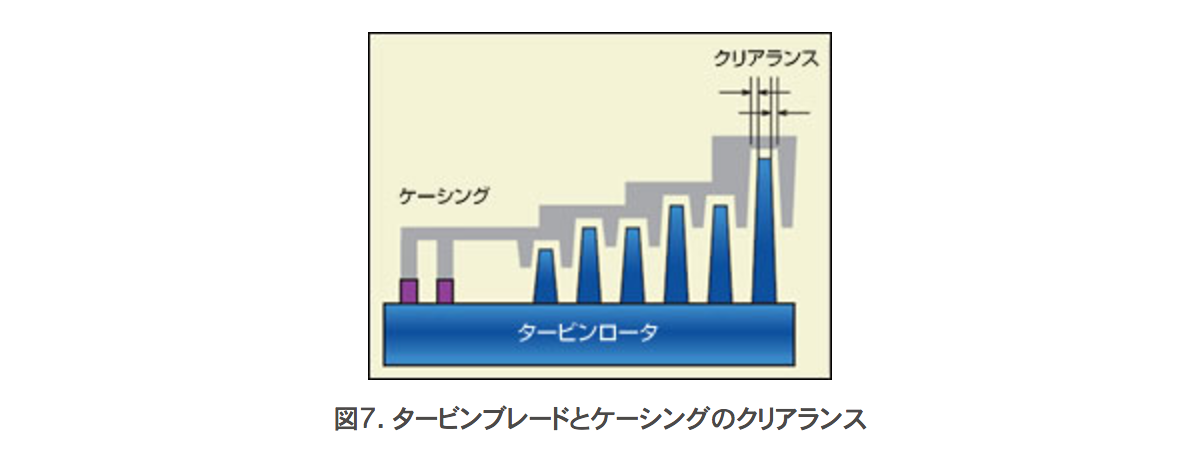
タービン運転中、図7に示すタービンブレードとケーシングの間のクリアランスが異常に狭くなって、接触するようなことになればタービンを損傷してしまう重大な事故となってしまいます。
したがって、伸び差計測は、大型のタービンにおける大変重要な監視項目となっています。
そのため、大型の発電用タービンでは1系統の伸び差計測システムが故障しても、問題なく伸び差計測を継続できるように、1箇所の伸び差計測に、センサから伸び差モニタまで3系統設置する三重化システムが採用されています。
伸び差モニタのレンジには、伸び差の原点となる「グリーンマーク」をゼロとして、ケーシングよりもロータの伸び量が大きい「ロータロング」方向をプラス、ケーシングよりもロータの伸び量が小さい「ロータショート」方向をマイナスとする場合と、ロータショート側の最小値をゼロ、ロータロング側の最大値をフルスケールとして、その途中の値にグリーンマークを配置する場合があります。
伸び差モニタレンジのスパンは、そのマシントレインの規模と、測定箇所によって異なりますが、大型のコンバインドサイクル発電システムの低圧タービン伸び差計測では50mmを超える場合があります。
さて、タービン起動後の伸び差は、ロータの方がケーシングより早く熱せられて膨張するため、ロータロング方向に動くこととなりますが、その起動過程ではロータが熱膨張するよりも早く、ロータの回転による遠心力(ロータが太く短くなる方向の力)でロータが縮み、一時的にロータショート方向に動きます。
これを「遠心力縮み」と呼びます。
その逆にタービン停止過程では、ロータが冷えて縮まるよりも早く、ロータ回転数の降下に伴う遠心力の低下により一時的にロータロング方向に動く「遠心力解放による伸び」が発生します。
したがって、タービン起動操作を行なう前には「遠心力縮み」を、タービン停止操作を行なう前には「遠心力解放による伸び」を考慮して、それでもなお接触を起こさない余裕を持った範囲にあることを確認することが必要となります。
伸び差計測センサ
伸び差計測には測定レンジが14mmのVK-143Pや、26mmのVK-263Pなど、ロングレンジの渦電流式変位トランスデューサが使用されます。
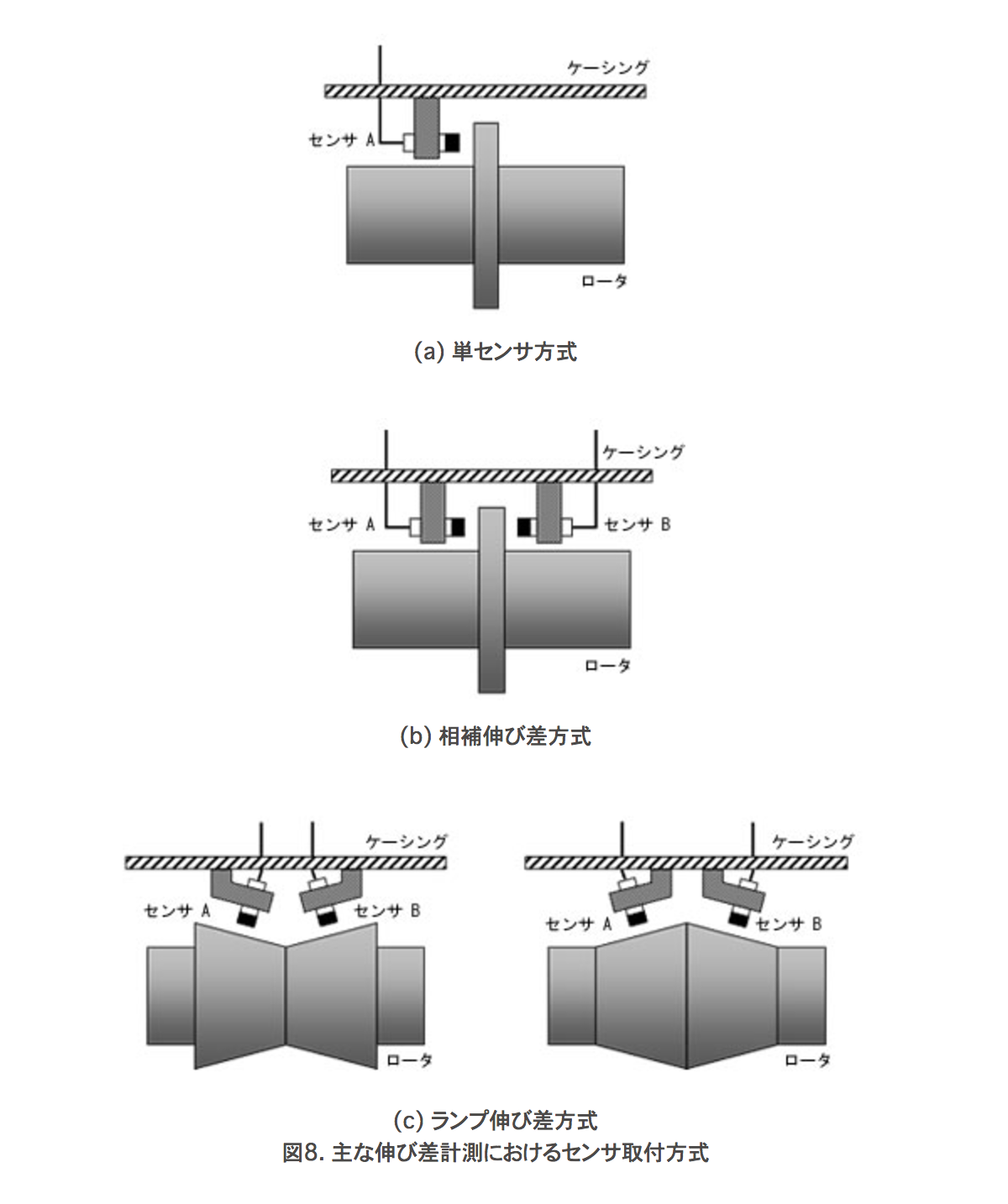
センサの取付に関しては、図8に示すように主なものとして、測定カラーに対して片側にセンサを配置する単センサ方式(図8-a)、測定カラーに対して両側にセンサを配置してセンサの測定レンジの2倍までの伸び差を測定できるようにする相補伸び差方式(図8-b)、および測定面をテーパ状としてセンサの測定レンジの数倍の伸び差を測定できるようにするランプ伸び差方式(図8-c)があります。
各伸び差方式と、それぞれの伸び差モニタの演算方法に関しては次回説明します。
出典:『技術コラム 回転機械の状態監視や解析診断』新川電機株式会社
![]()