![]()
2017/5/23 ものづくりニュース
【渦電流センサ以外の振動センサ】vol.2 圧電型振動センサ
渦電流方式以外の原理で回転機械の振動監視に適用されるセンサとして、前回は動電型振動センサについて説明しましたが、今回は圧電型振動センサについて説明します。
圧電型振動センサ
圧電型振動センサは圧電素子のもつ圧電効果を利用して振動を測定するセンサです。
圧電素子は、外力を加えるとその力に比例した電荷を生じ、逆に電圧を加えると歪を生じます。
この様な現象を圧電効果と呼び、マイクロホン、スピーカ、アクチュエータ等に応用されています。
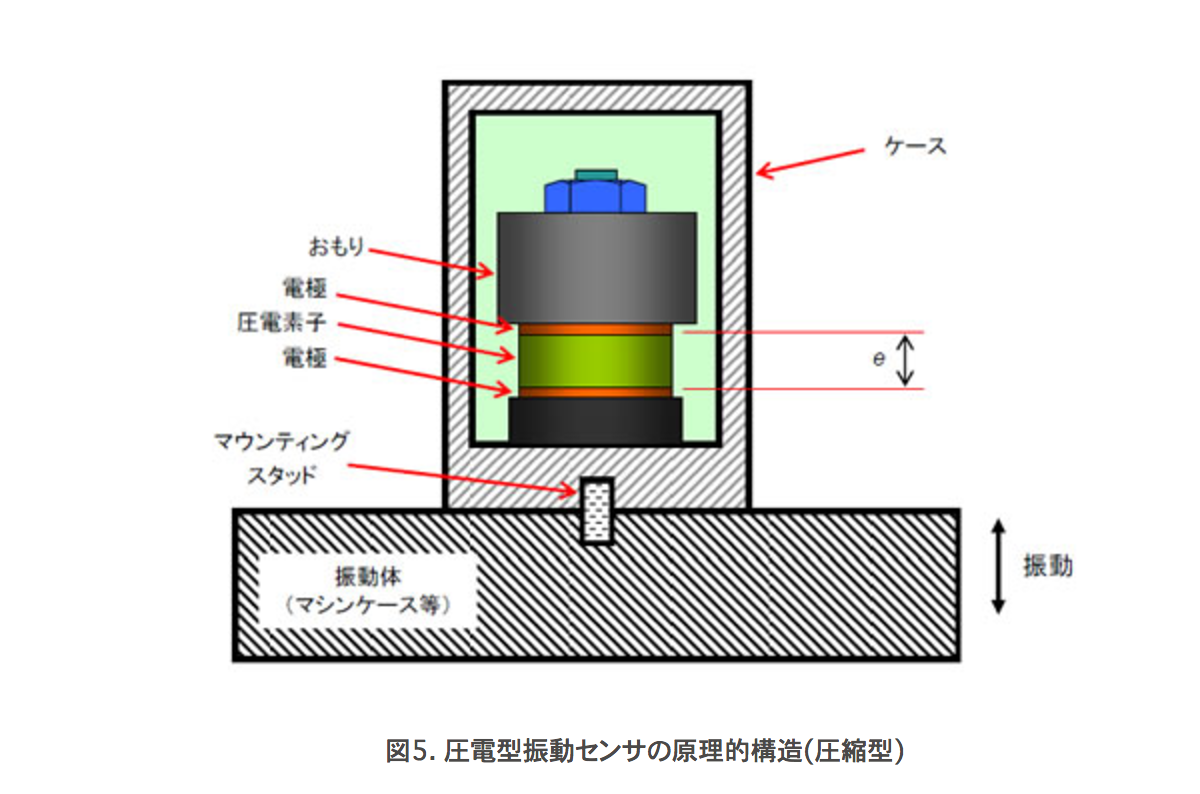
図5に圧電素子を使った振動センサの原理的構造を示します。
これは圧縮型と呼ばれる構造で、センターのボルトを締めることで一定のプリロードをかけるとともに、圧電素子とボルトのバネ性とおもりの質量から成る系を構成しています。
このプリロードにより圧電素子には一定の電荷が生じていますが、振動体が図の上方に向けて加速している時には、おもりの慣性によって圧電素子を更に圧縮する力が加わり(加圧)、逆に振動体が図の下方に向けて加速している時には圧電素子の圧縮を弱める方向に力が加わる(減圧)ことになります。
このようにして振動により繰り返される加圧と減圧に応じて圧電素子の両極に生じる電荷が増減します。
この電荷をチャージアンプ(電荷増幅器)で電圧に変換することにより、加速度に比例した電圧信号を取り出すことができます。
電荷出力タイプの圧電型振動センサは小型化に有利であり、実験用等でよく使用されますが、チャージアンプまで専用のローノイズケーブルを使用する必要があり、またローノイズケーブルの曲げ状態の変化や温度などによる浮遊容量の変化の影響を受けるため注意が必要です。
これに対して、機械の状態監視用に常設される圧電型振動センサには、外部にチャージアンプを必要とせず、一般の計装用シールドケーブルを適用できるアンプ内蔵タイプの圧電型振動センサが一般的に使用されます。
これは、加速度に比例した電圧信号を出力するため、圧電型加速度センサ(または圧電型加速度トランスデューサ)ということができます。
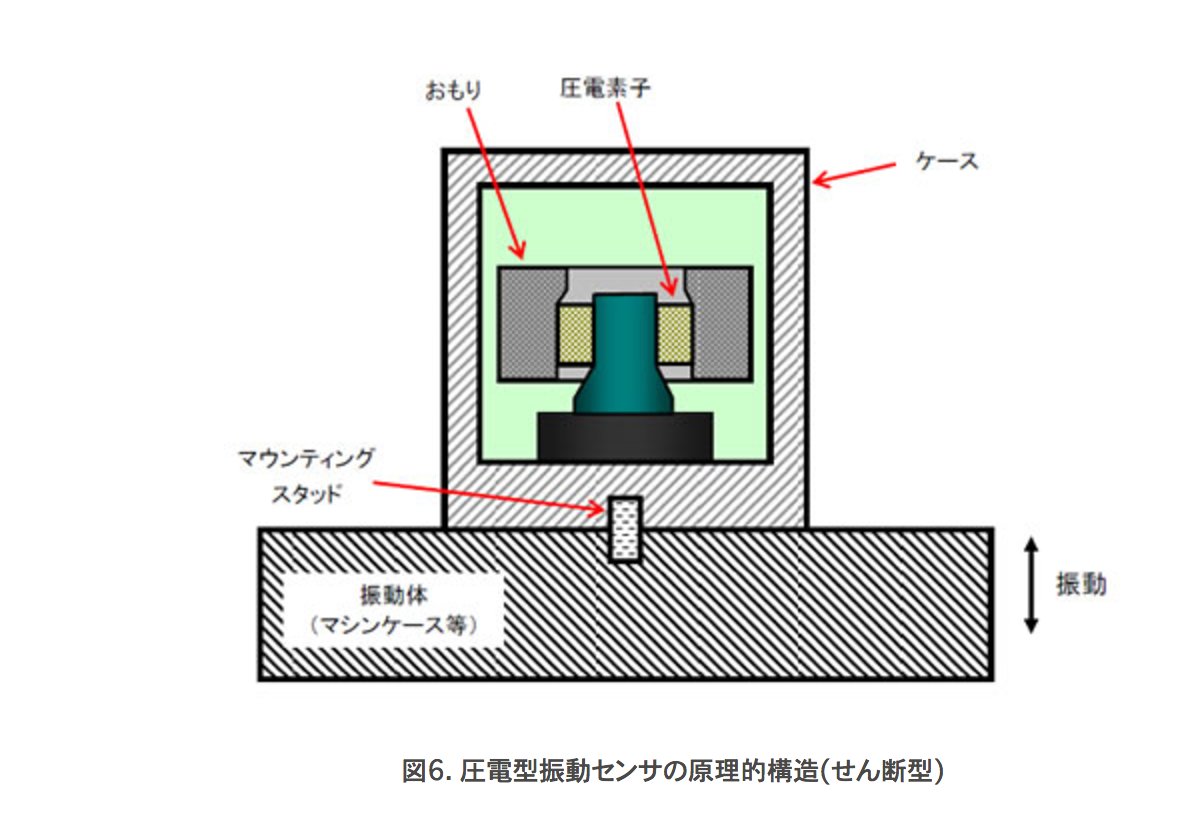
図5の構造は圧電素子を圧縮する方向の圧電効果を利用しているため圧縮型と呼ばれますが、これに対して図6の構造は圧電素子のせん断方向の力による圧電効果を利用する方式でせん断型と呼ばれます。
圧縮型の方が大きな電荷を得やすいが、素子内に温度勾配を生じるような急激な温度変化による影響(パイロ電圧)を受けやすいという傾向があり、一方せん断型はこのパイロ電圧の影響を受けにくいといった特徴があります。
さて、前回の動電型振動センサに関しては、非常に柔らかいバネで支えられた振動系を構成するため、機械的にはあまり頑丈とは言えないと述べましたが、これに対して圧電型振動センサは非常に硬いバネで構成されていてほとんど変位しないため、動電型に比べて機械的に非常に頑丈な構造を持ったセンサであると言えます。
動電型は速度を検知していますが、圧電素子は加速度を検知しているため、圧電型振動センサの内蔵アンプの中に積分回路を入れることで加速度信号を積分して速度に比例した電圧信号を出力するようにした圧電型速度センサ(圧電型速度トランスデューサ)が動電型振動センサの代わりに使われるようになってきています。
圧電型振動センサの取付方法と周波数特性
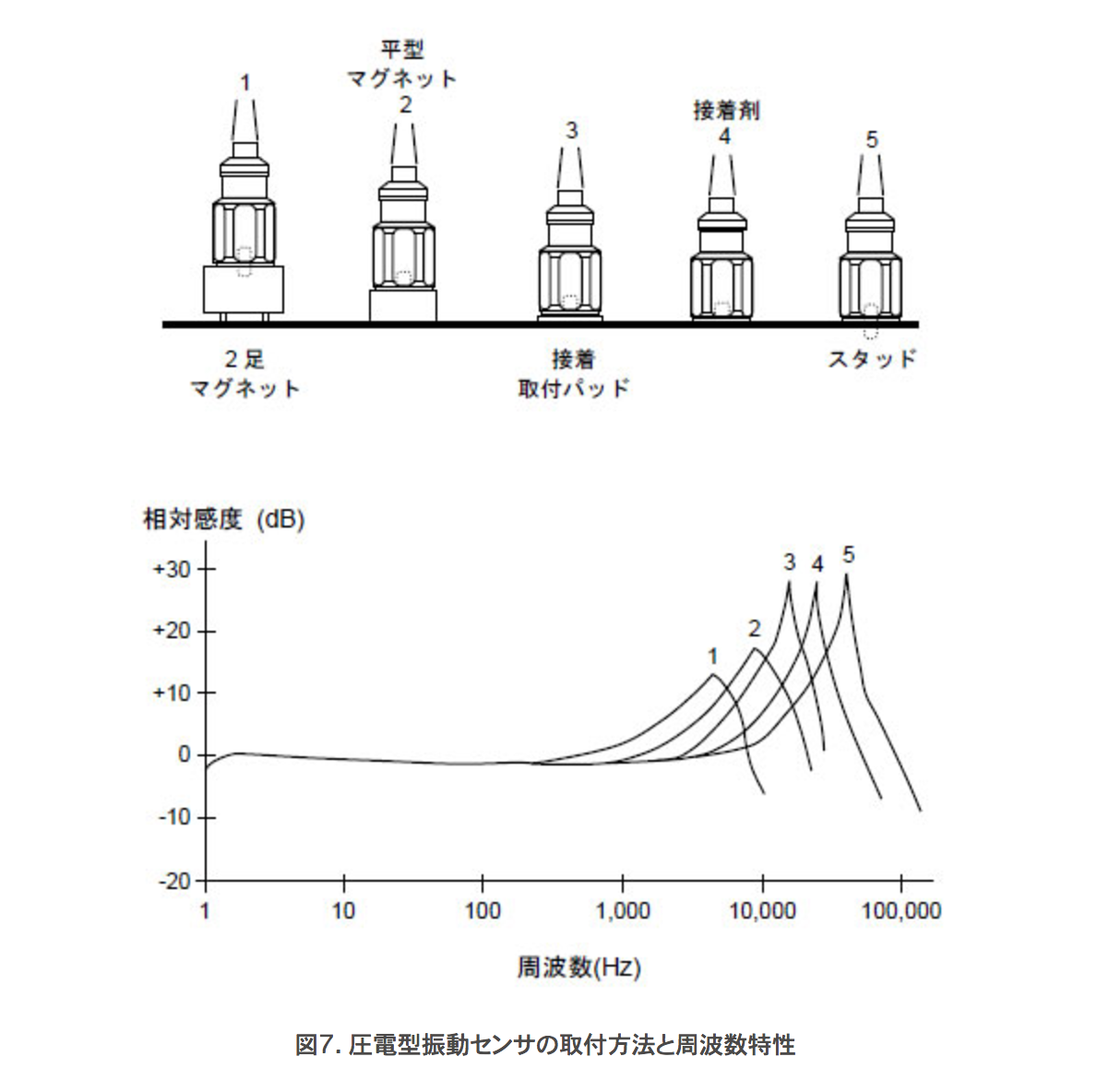
圧電型振動センサを対象の機械に取付ける場合、取付面を平らに仕上げ、センサが完全に密着するようにスタッドボルトでしっかりと固定することが推奨されます。
こうすることで、センサの共振周波数は本来設計されている数十kHzとなり、ローパスフィルタによりこの共振周波数をカットするように信号処理しても、10kHz前後までの振動計測が可能となります。
しかし、取付方法によっては共振周波数が低くなってしまい、正確な計測ができなくなる恐れがあります。
図7に接着やマグネットによる取付例とその時の周波数特性を示します。
この図は一例であり、絶対値は機種や取付けの細かい状態により異なりますが、相対的な特性変化を参考にして、スタッドボルト以外での取付けの際には注意をする必要があります。
これまで、機械の状態監視に適用される振動センサとして、渦電流式変位センサ、動電型速度センサ、圧電型加速度(速度)センサについて説明してきましたが、振動センサといっても、それぞれ変位、速度、加速度と測定パラメータが異なっています。
次回は、これらの違いと使い分けに関してより深く理解していただくために、振動の3つのパラメータである変位、速度、加速度の関係について説明したいと思います。
出典:『技術コラム 回転機械の状態監視や解析診断』新川電機株式会社
![]()