![]()
2017/3/23 ものづくりニュース
豆蔵、アーム型ロボットの設計新手法を実用化。来年度には自社製ロボットも
協働ロボットやサービスロボット、コミュニケーションロボットなど、さまざまなロボットが市場に出るなか、豆蔵は、東京農工大学との共同研究により産業用ロボットアームの開発期間を短縮するための設計手法を実用化した。これまでロボットメーカーのみが保有していたロボット設計・製造における経験則等を取り入れた手法を確立し、新たなロボット市場とそれに対応したロボット開発を支援していく。
一般的に産業用ロボットアームの新規開発では、既存のロボット開発の経験に基づいて実機ベースで試作・検証を繰り返すため、通常完成までに数年の期間を要する。これに対し共同研究では、豆蔵の強みであるソフトウエア技術、モデルベース開発プロセスと、東京農工大学 工学研究院 先端機械システム部門 遠山 茂樹教授のロボット工学の知識を融合し、短期間で競争力のある産業用ロボットを市場に出すための設計手法の構築を目指してきた。
このたび共同研究で構築した設計手法を大型、中型の6軸産業用ロボットアームに適用して、実機試作、実機検証を行ったところ、初号機で量産機に近い性能を達成。開発期間を大幅に短縮する産業用ロボットアームの設計手法の実用化にいたった。
【同研究の特徴】
一般的に、産業用ロボットアームの新規開発では、実機ベースで試作・検証を繰り返すため、完成までに数年かかっていた。それに対し、同手法では少ない実機試作回数で同等の性能を達成する設計手法を実用化した。
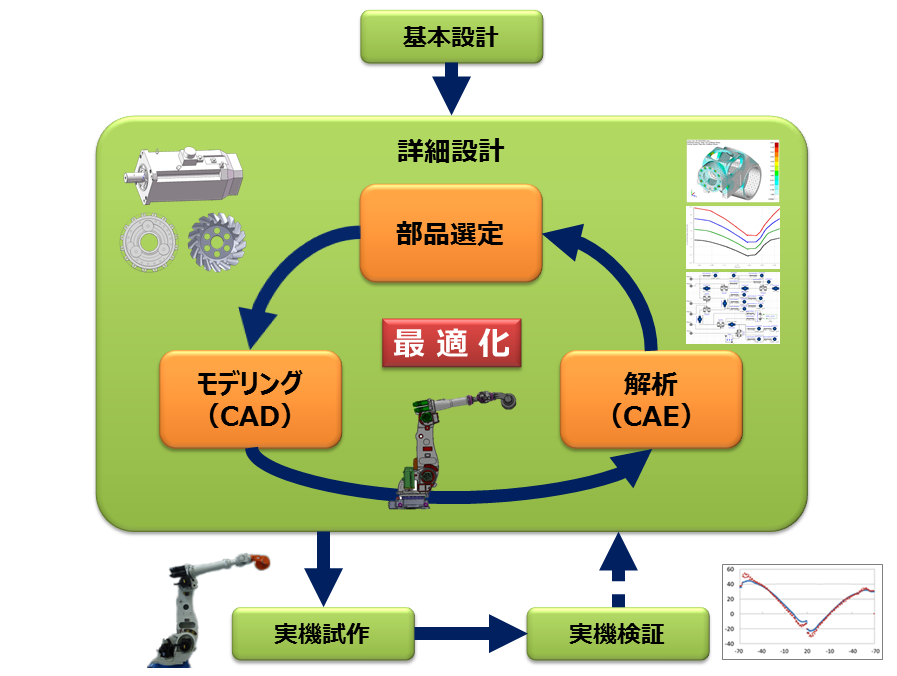
実機の代わりにコンピュータ上にロボットアームのモデル(CADモデルおよびシミュレーションモデル)を作成。物性や部品特性など、精密なデータを用いてモデリングし、次に、同じくコンピュータ上でそのモデルの動的解析、静的解析、構造解析を行い、解析結果をモデルにフィードバック。これを繰り返すことで設計の最適化を行います。これによって得られた設計結果から実機試作を行う。製作された実機に対してシミュレーションと同様の性能評価を行って性能(出力トルク、最高速度、先端の位置精度など)の差異を抽出し、その結果をシミュレーションモデルにフィードバックしてシミュレーションの精度を高めることができる。
特に、これまでロボットメーカーでしか知見のなかった、特殊部品の検証などを行い、それをデータ化。シミュレーションの精度をあげる事に成功している。
同社は、来年度には自社製ロボットの試作を行う予定。また設計手法をベースとした開発支援サービスなどを提供していくとしている
参考:豆蔵、産業用ロボットアームの開発期間を短縮する設計手法を実用化
![]()