![]()
2017/8/7 ものづくりニュース
火星探索機「ローバー」に視界を与える
2011年11月、Mars Science Laboratory(火星科学研究所)は火星への5億km、9ヶ月の旅を開始しました。
このミッションの「キュリオシティ」ローバーは、2012年8月6日に火星表面に降下しましたが、このローバーには3種類の科学的イメージングシステムに電力を供給するために、オン・セミコンダクター製のイメージセンサが搭載されていました。

これらのシステムの各カメラには、KAI-2020イメージセンサ、機械視覚検査や顕微鏡検査などの(陸上)イメージングアプリケーション用に設計された2メガピクセルCCDが搭載されていました。
しかし、このローバーには地上の場合よりも少し異なる形でセンサが使用されています。
・MARDI (Mars Descent Imager:火星降下イメージャ)は、ローバーが惑星表面に向かって降下している間に数百枚の画像を撮影しており、惑星表面への実際のローバーの着陸を示す壮大な映像が得られました。
・MAHLI(Mars Hand Lens Imager:火星ハンドレンズ・イメージャ)は、火星の地質学的歴史をより良く理解するために、火星の岩石や土壌の高解像度画像を撮影します。
最も近い範囲では、このカメラはピクセル当り1/1000インチ(14ミクロン)未満で画像を解像でき、人の毛髪の幅よりも小さい物体の検出が可能です。
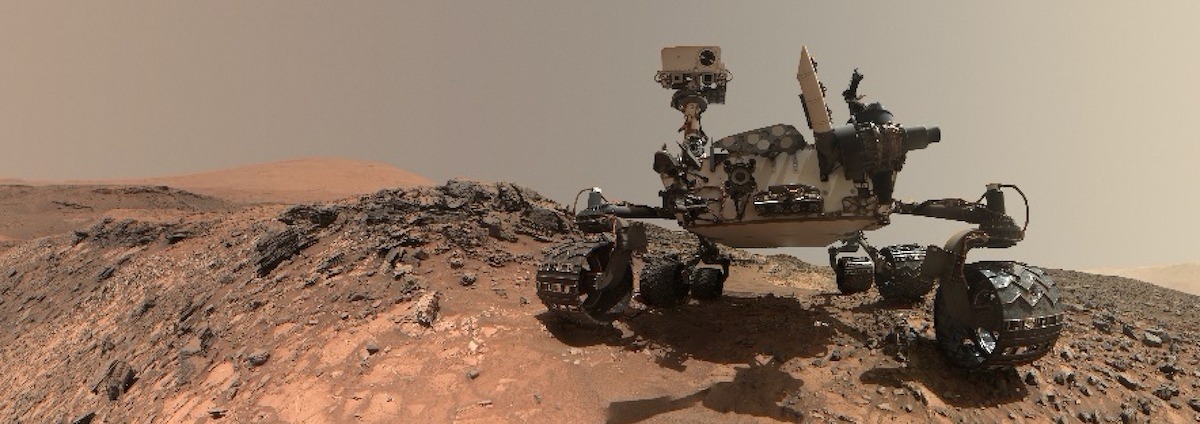
これもNASAが組成の状態を調査するために使用するローバーの「自撮り」画像の撮影に使用されるカメラです。
・最後に、MastCam (Mast Camera:マストカメラ)は、ローバーが探索した地形の高解像度画像の撮影に使用されます。
・これはMastCamの望遠カメラで撮影した850枚の個別画像から編纂した億ピクセル火星パノラマ画像を含め、ローバーによって提供される火星風景の詳細なパノラマビューのソースです。
「キュリオシテイ」ローバーは、古代の火星には確かに微生物を生かせる適切な化学的性質が存在したという大きな成果を含め、火星で目覚ましい結果を残しました。
キュリオシティは、マウント・シャープと火星の他の要所を探索し続けており、任務はまだ終わっていません。
キュリオシティが次に何を発見するかは定かではありませんが、何であれキュリオシティによる発見は嬉しいことであり、これからも見守っていきたいものです。
「キュリオシティ」ローバーの詳細に興味がある場合、まずこのミッションのためのメインNASAウェブサイトこのミッションのウェブサイトにアクセスするとよいでしょう。
このサイトには、ローバー上のサイエンスカメラで撮影した画像のギャラリも含まれます。
出典:『火星探索機「ローバー」に視界を与える』オン・セミコンダクター
![]()