
![]()
2017/11/28 ものづくりニュース
分かりにくい用語とその意味(5)位相基準信号(フェーズマーカ)
今回は、回転機械の振動解析で必要になる位相基準信号(フェーズマーカ)について説明します。
これまでのコラムの中でも、振動解析に関連した説明の中では「位相基準信号(フェーズマーカ)」という用語を何度も使ってきていますが、「1パルス/1回転の位相基準信号」という程度の表現で、あまり詳しい説明はしていないので、今回はアニメーションを使ってできるだけ分かりやすく説明したいと思います。
位相基準信号(フェーズマーカ)とは?
図6に示すイメージのように、例えばキー溝状の切り欠きがロータ上に1箇所だけ(1回転中に1箇所)あるとすると、そこに変位センサが対向するように設置させることで、1回転毎に1つのパルス状の信号を得ることができます。
これが位相基準信号(フェーズマーカ)ということになります。
勿論、このパルス状の信号を波形整形回路できれいなパルスに整形した信号も位相基準信号(フェーズマーカ)ということができます。
▲図6. 振動解析システム(infiSYS_RV-200)の信号処理の流れ
この信号は、回転機械の振動解析を行う場合、振動ベクトルの位相角を演算する時の基準点となるものです。
また、振動解析システムにおける回転数の計測や同期サンプリングのタイミング信号ともなるものです。
なお、1回転で1パルスの同様な信号は振動解析以外でも、偏心計のタイミングパルスや、回転機械ではありませんが、レシプロコンプレッサのピストンロッドドロップ計測のタイミングパルスとして利用されていて、やはり位相基準信号(フェーズマーカ)と呼ばれることがありますが、今回の説明では対象外とさせていただきます。
位相基準信号(フェーズマーカ)の機械的な意味は?
位相基準信号(フェーズマーカ)の検知用に使われるキー溝状の切り欠き(または突起:以下「位相基準」とする)は、そのロータにおける角度の基準となるものです。
ポーラ線図やボード線図で位相角を表示しますが、この時の位相角θは、位相基準を0度として回転方向とは逆方向にθだけ角度を振った位置と対応します。
例えば、ある回転体が回転同期成分(1X)だけで振動していて、その時の振動ベクトルの位相角がθ1であったとすると、この回転体は位相基準からθ1だけ遅れた位置(回転方向とは逆方向にθ1)を触れ回りの中心から外側に向けて回転しているということになります。
言葉での説明だけでは難解かと思いますので、そのイメージを図7のアニメーションにしています。
▲図7. 位相基準と位相角
なお、回転数が1次の危険速度よりも十分に低い時には、不釣合い(重心の偏り)はほぼθ1の方向にあることになります。
ただし、回転数が上昇するとともに振動ベクトルの位相角は変化しますので、常に[不釣合い方向]≒[振動ベクトルの位相角]という訳ではなく、弾性軸受(フレキシブルロータ)ではほとんどの場合[不釣合い方向]≠[振動ベクトルの位相角]ということになります。
位相基準信号(フェーズマーカ)の検知方法は?
図8に具体的なセンサ配置のイメージとして、「すべり軸受で支持されたタービンへのAPI 670システム構成例」を示していますが、この中の10が位相基準センサになります。
この例では位相基準信号は回転計(Tahcometer)に入力されていますが、振動解析を行う場合にはこれを位相基準信号(フェーズマーカ)として使用することができます。
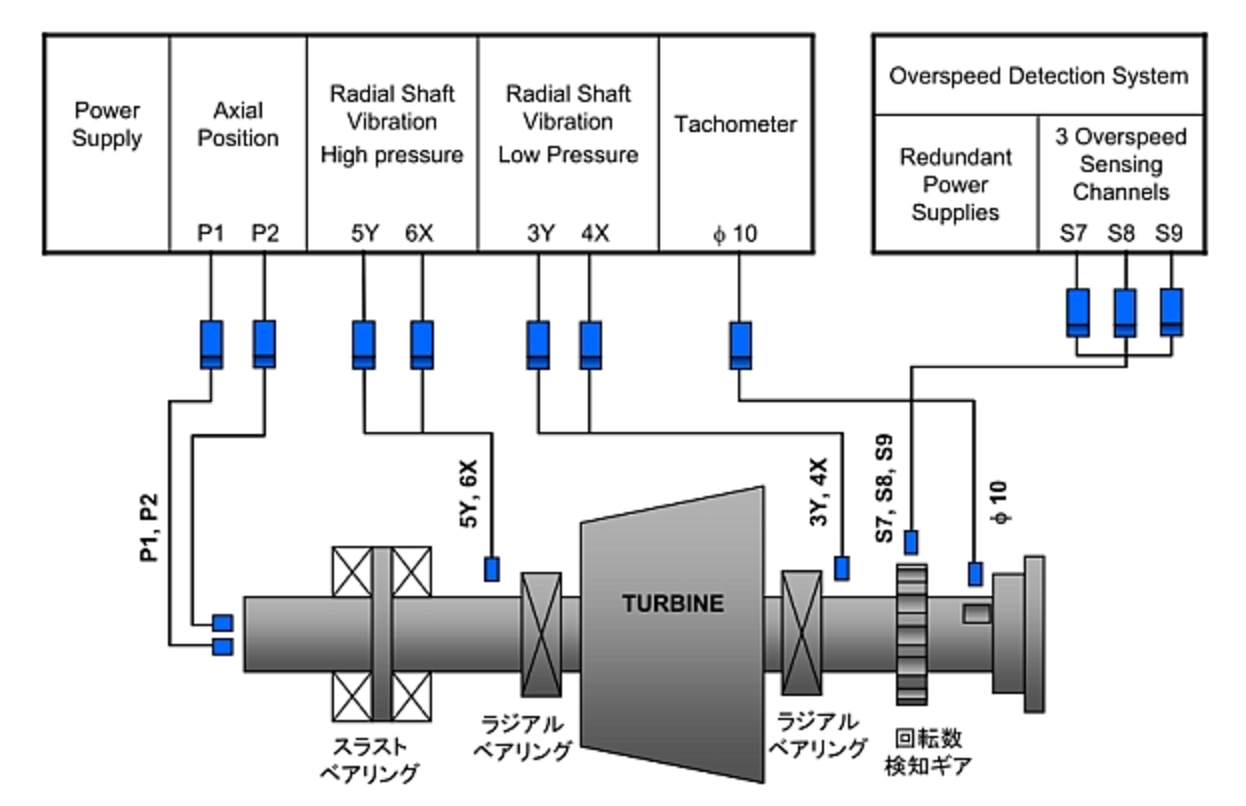
▲図8. すべり軸受で支持されたタービンへのAPI 670システム構成例
※図8は、API Standard 670 Fourth Edition, December 2000 の ”Figure H-1 – Typical System Arrangement for a Turbine With Hydrodynamic Bearings”を基にして、各センサの配置はそのままとして、図のイメージと方向を変更して作成しています。
図9はこの部分だけを抜き出したイメージのアニメーションですが、位相基準のあるロータに適切なギャップを持って渦電流式変位センサを設置することで、センサ直下を位相基準が通過するタイミングで出力電圧が変化して、パルス状の位相基準信号を生成する様子を示しています。
▲図9. 位相基準信号の検出
出典:『技術コラム 回転機械の状態監視や解析診断』新川電機株式会社
![]()