
![]()
2017/2/21 ものづくりニュース
【API 670規格-Machinery Protection Systems-概要】vol.1 システム構成要素と非接触変位センサに対する要求仕様
前回までのコラム「回転機械の状態監視」の中でも「API 670規格に準拠したセンサ」とか「API 670規格で規定された監視モニタ」など何度も登場した「API 670規格」に関して、その概要を説明します。
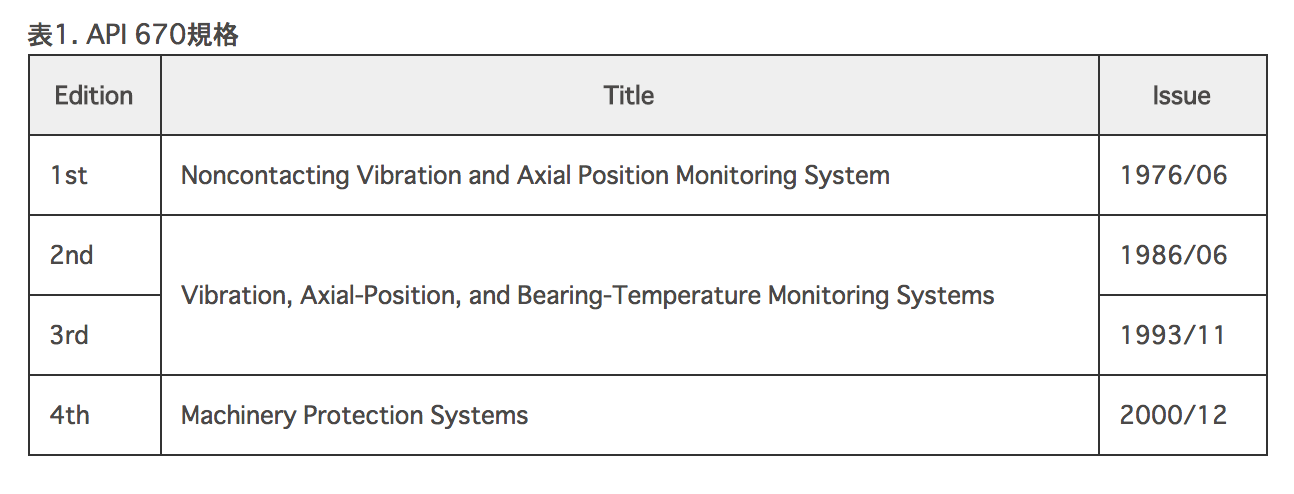
1.API 670規格とは
API 670規格とはアメリカ石油協会(American Petroleum Institute)の規格で、石油精製、石油化学プラントにおける重要な回転機械の監視・保護機器に関する詳細な要求事項が示されたものであり、現在2000年12月発行の4th Editionが最新版として適用されています。
この規格は表1のタイトルが示すように、当初非接触の軸振動と軸位置の監視システムに関するものでしたが、2nd Editionからケーシング振動やベアリング温度なども取り込み、4th Editionでは機械の保護に関する重要なパラメータとして回転数、オーバースピード検知、更に回転機械ではありませんがレシプロコンプレッサのピストンロッドドロップ監視なども取り込みタイトルを「Machinery Protection Systems」と改訂しています。
なお、API 670 5th Editionに関して2008年にTaskForceが招集され、現在、現行規格の改訂に関する討議が行なわれています。
2.適用範囲とシステム構成要素
API 670 規格は以下の状態パラメータを監視している機械保護システム(Machinery Protection System)に対する最低限の要求事項をカバーしたものです。
- 軸振動 (Radial Shaft Vibration)
- ケーシング振動 (Casing Vibration)
- 軸位置 (Shaft Axial Position)
- 回転数 (Shaft Rotational Speed)
- ピストンロッドドロップ (Piston Rod Drop)
- 位相基準 (Phase Reference)
- オーバースピード (Overspeed)
- 温度 (Temperatures)
API 670規格における機械保護システム(Machinery Protection System)とは図1に示すように、トランスデューサシステム(Transducer System)とモニタシステム(Monitor System)から構成されています。
トランスデューサシステムはセンサ(Sensor)とケーブル、更に必要な場合にはシグナルコンディショナ(Signal Conditioner)とで構成されます。
センサの種類としては、非接触変位センサ(Proximity Probe)、測温抵抗体(RTD)、熱電対(Thermocouple)、加速度センサ(Accelerometer)、および電磁ピックアップ(Magnetic Speed Sensor)が挙げられていますが、規格本文では非接触変位センサ、加速度センサおよび電磁ピックアップに対する要求仕様が掲載されています。
特に、非接触変位センサに関しては詳細な要求仕様が述べられています。
また、シグナルコンディショナとしては、非接触変位センサのための発振・復調器(Oscillator-Demodulator)※1のみが対応しており、その他のセンサに関してはシグナルコンディショナに相当するものはありません。
※1発振・復調器(Oscillator-Demodulator)は、新川電機のVKシリーズおよびFKシリーズのドライバ(Driver)に相当する部分です。
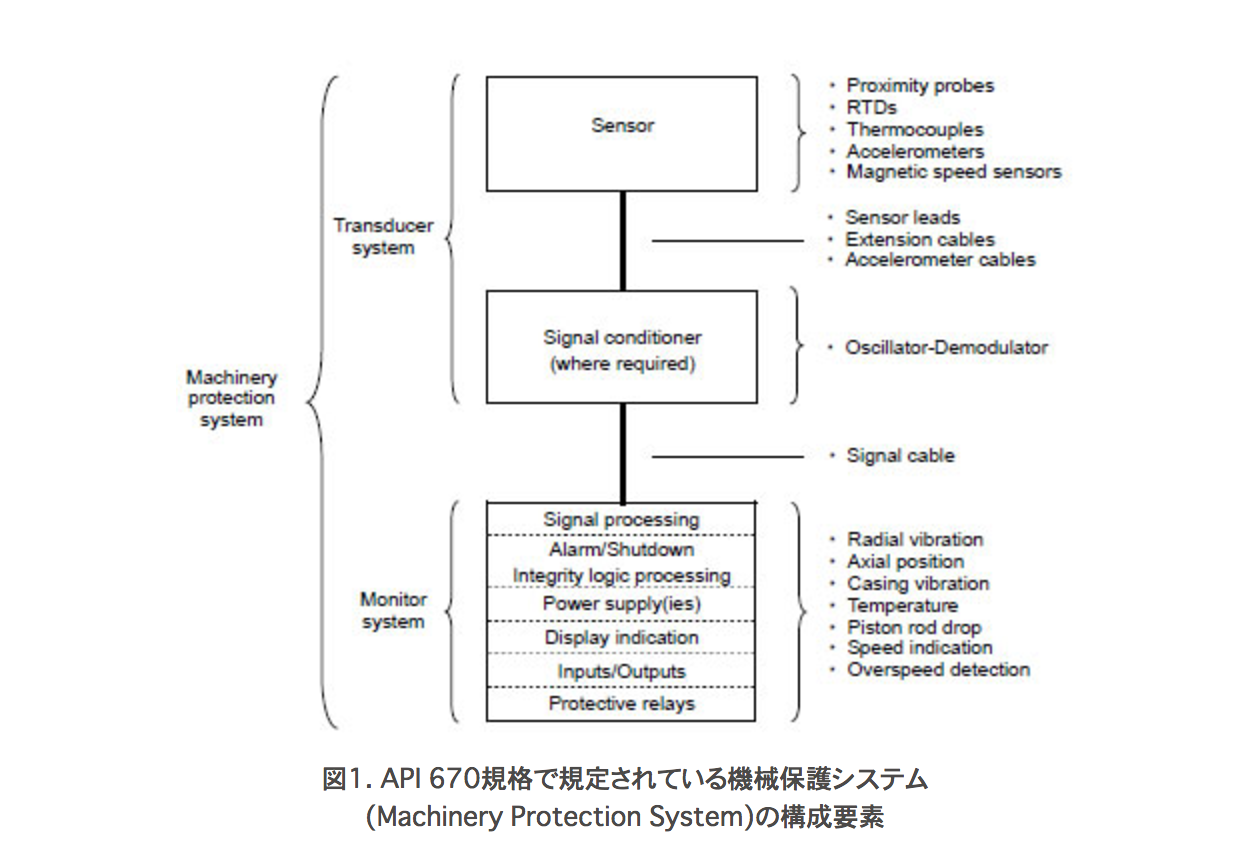
※図1は、API Standard 670 Fourth Edition, December 2000の“Figure 1-Machinery Protection System”より転載しています。
モニタシステムは、信号処理(Signal Processing)、警報ロジック(Alarm/Shutdown Integrity Logic Processing)、電源(Power Supply)、表示(Display Indication)、入出力(Input/Output)、保護リレー(Protective Relay)の各機能ブロックから構成されたもので、状態監視項目に応じて、軸振動、軸位置、ケーシング振動、温度、ピストンロッドドロップ、回転数、オーバースピードが挙げられています。
API 670規格では、これらの各構成要素に対する機能、精度、寸法などの要求仕様や取り付け方法などに関して詳細に述べています。
3.非接触変位センサ(Proximity Probe)
ここでは、トランスデューサシステムとして特に詳細に規定されている非接触変位センサ(Proximity Probe)に関して少し詳しく見ていきます。
まず、主な要求仕様を表2にまとめてみました。
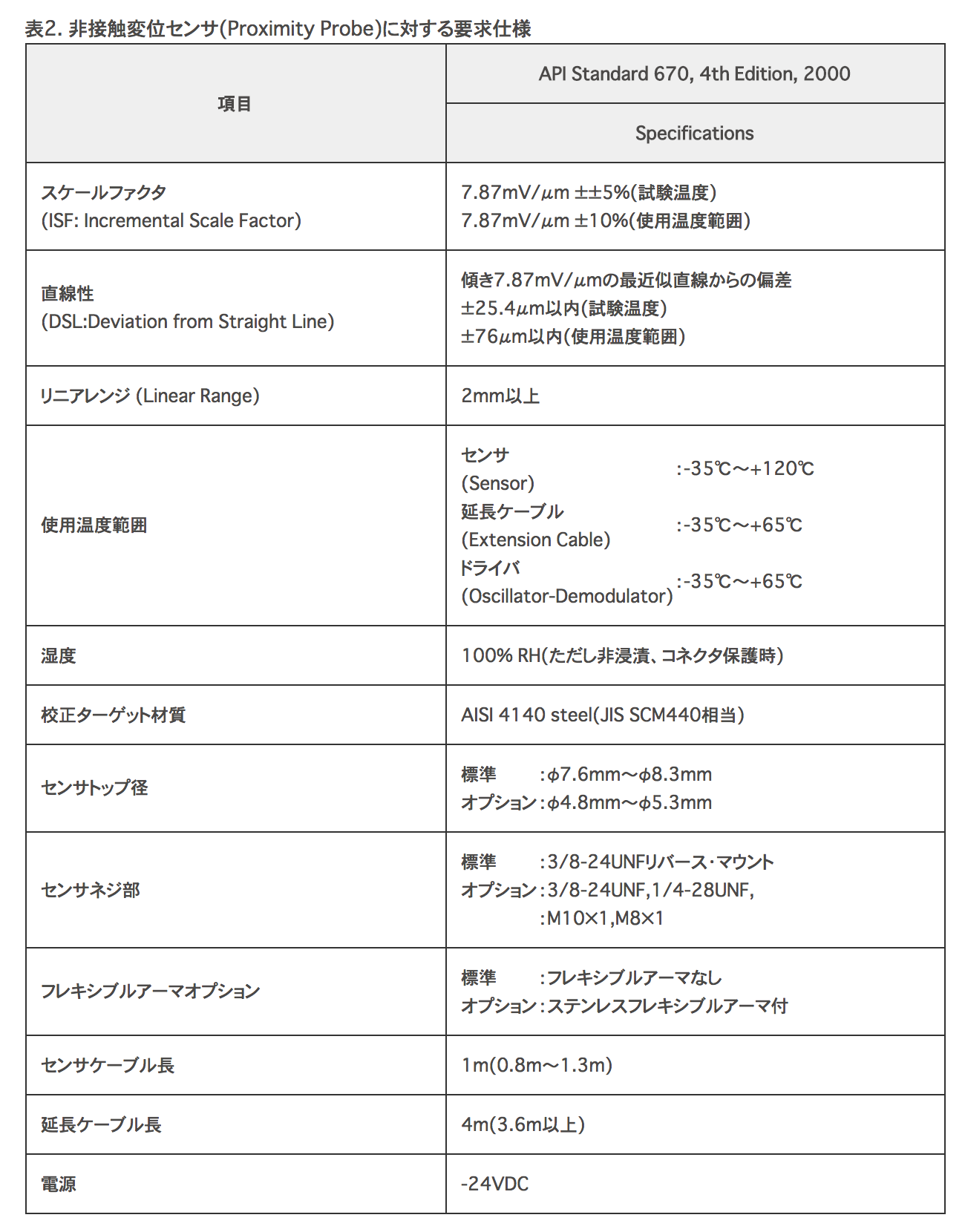
スケールファクタは、基準単位長さ当たりの出力変化(Δy/Δx)であり、API 670規格では基準単位長さを通常250μmとしてスケールファクタ基準値を7.87mV/μmと規定しています。
また、実測スケールファクタの規定値に対する差であるスケールファクタ誤差を、7.87mV/μmの±5%と規定しています。
このスケールファクタ誤差が振動計測時の精度に関与する値であり、[振動の読み値]×[スケールファクタ誤差]が測定誤差に対応します。
例えば、振動測定値が100μmであったとすると、その誤差は±5μmということになります。(ここでは、振動モニタの変換精度は含んでいません。)
API 670における直線性の定義は、傾き7.87mV/μmの最近似直線に対する実測データ(校正曲線)の偏差 d であり、±25.4μm以内と規定されています。
これは軸位置計のような変位測定に対する精度に対応しています。
これは測定値(軸位置の値)に係わらず、どの測定点においても最大±25.4μmの誤差を含む可能性があるということになります。
リニアレンジとは、上記のスケールファクタと直線性がAPI 670規格の規定値を満足する変位xの範囲のことであり、これが2mm以上あることが要求されています。
図3にFK-202Fトランスデューサの標準特性を示しています。
この例では、変位0.25mm~2.25mmの範囲でスケールファクタ誤差と直線性が規定値を満足しており、この範囲がリニアレンジとなります。
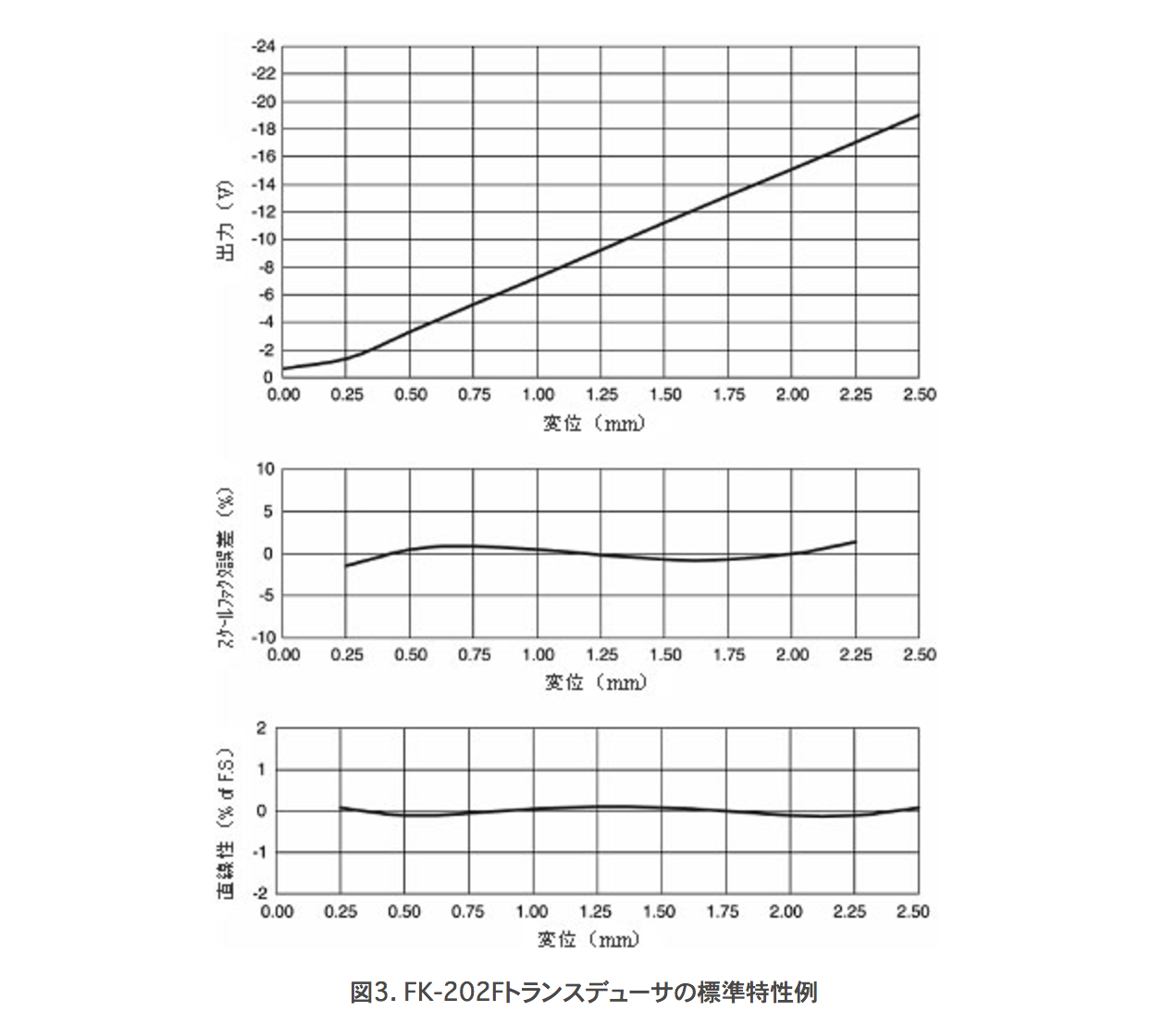
表2に示す通り、API 670規格では精度や機能だけでなく、センサの形状、ネジ部の寸法やケーブル長まで細かく規定されています。
なお、API 670規格準拠の非接触変位センサとして適用されているトランスデューサシステムは、システムケーブル長5mと9mのものが一般的に使われていますが、API 670規格では[センサケーブル長1m]+[延長ケーブル長4m]のシステムケーブル長5mのシステムのみが規定されています。
さて、次回は図1の下半分に示すモニタシステムに関して説明します。
出典:『技術コラム 回転機械の状態監視や解析診断』新川電機株式会社
![]()