![]()
2017/8/8 ものづくりニュース
【状態監視モニタ】vol.8 回転モニタ(その2)
前回は回転モニタの信号処理の流れと入力センサに関して説明しましたが、今回は振動モニタや変位モニタにはない、回転モニタ特有のパルス整形回路のヒステリシス設定や、オートトリガとマニュアルトリガの違いと特徴等について説明します。
これは回転パルス誤検知を防ぐための基礎知識としても必要な内容であり、回転モニタに限らず、1パルス/1回転の位相基準を検知するフェーズマーカモジュールや偏心モニタにおいても関係があります。
パルス波形整形回路のヒステリシス
回転モニタ内部のパルス波形整形回路では、センサの種類とターゲットの形状等によりさまざまな波形となるセンサからの信号を、例えば、ローレベル0Vとハイレベル5¥5Vのきれいなパルスに整形しています。
このパルス波形整形回路では、図12のようなON(5V)、OFF(0V)の判断処理が行われています。
入力信号がトリガレベル設定電圧より高い時はONに、トリガレベル設定電圧より低い時はOFFにしてパルスを整形しますが、このトリガレベルに幅を持たせて、整形パルスをONにする入力電圧とOFFにする入力電圧に差を持たせるようにしています。
この幅のことをパルス波形整形回路のヒステリシスと呼びます。
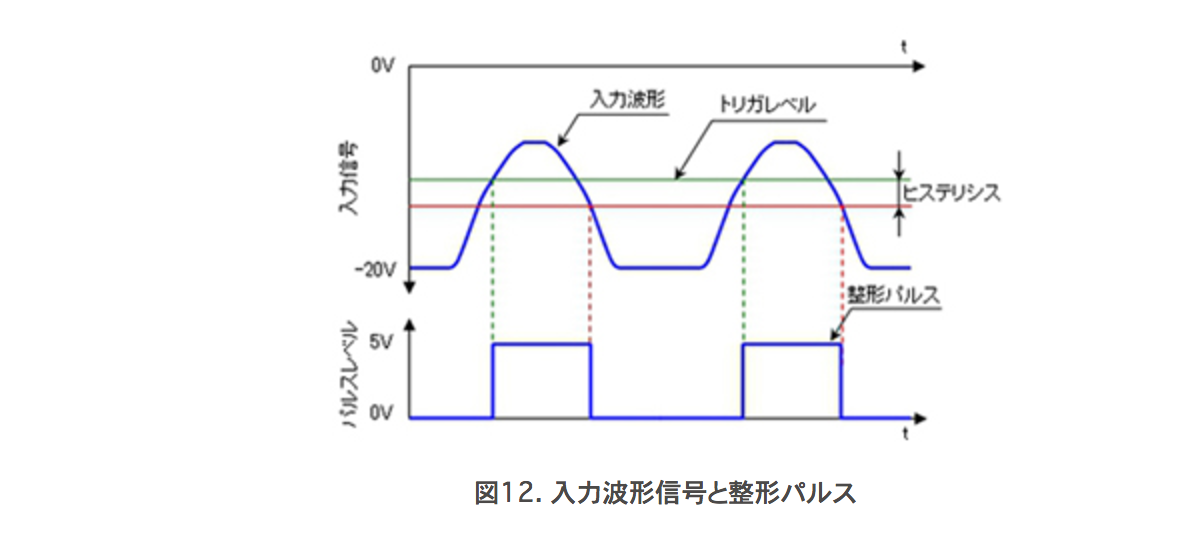
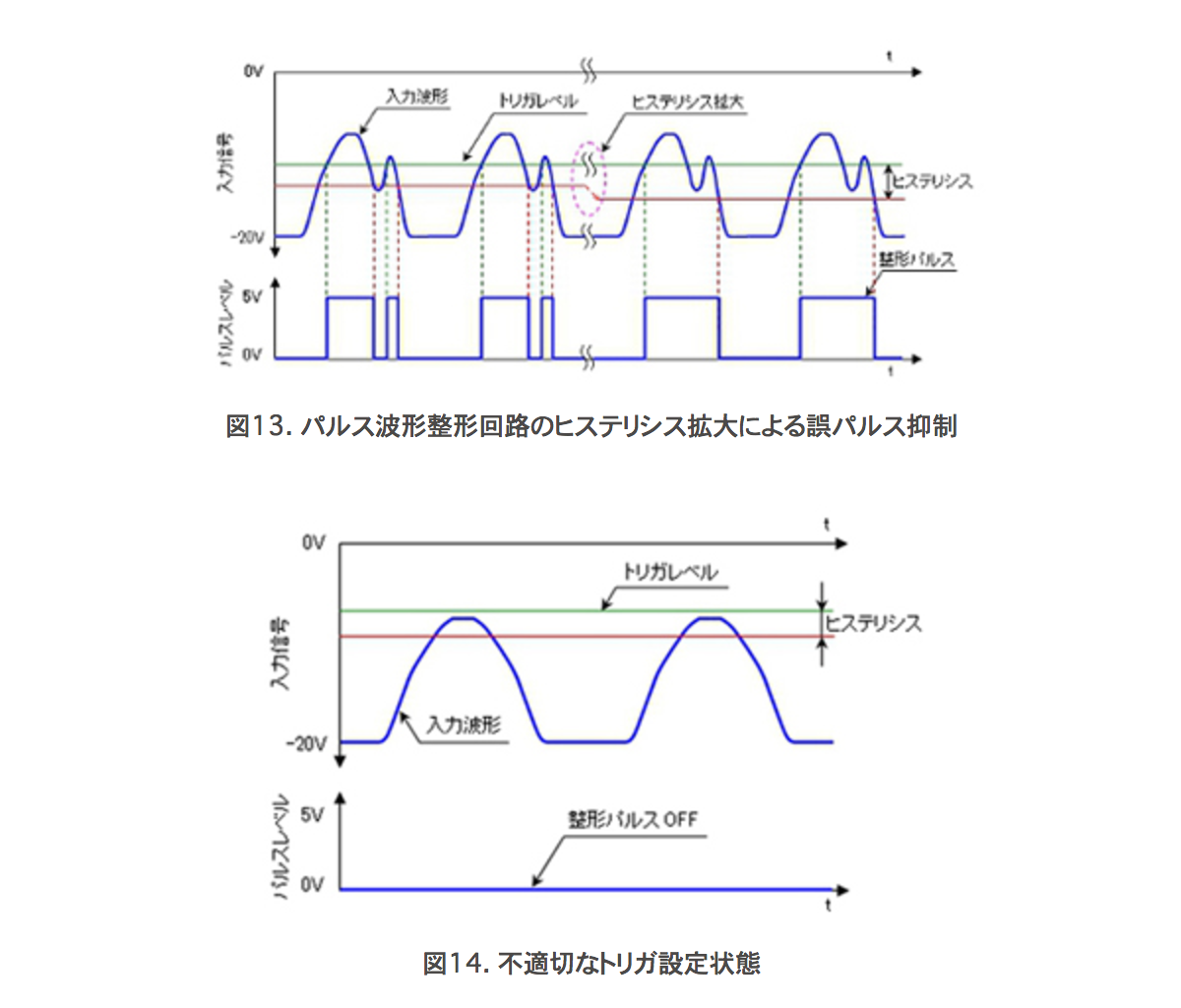
図13に示すように、このヒステリシスにより、入力信号に乗ったノイズや大きな波形歪による誤検知をある程度防ぐことができます。
ただし、入力信号の振幅よりヒステリシスが大きくなったり、図14のような設定になってしまうとパルスが検知されなくなりますので注意が必要です。
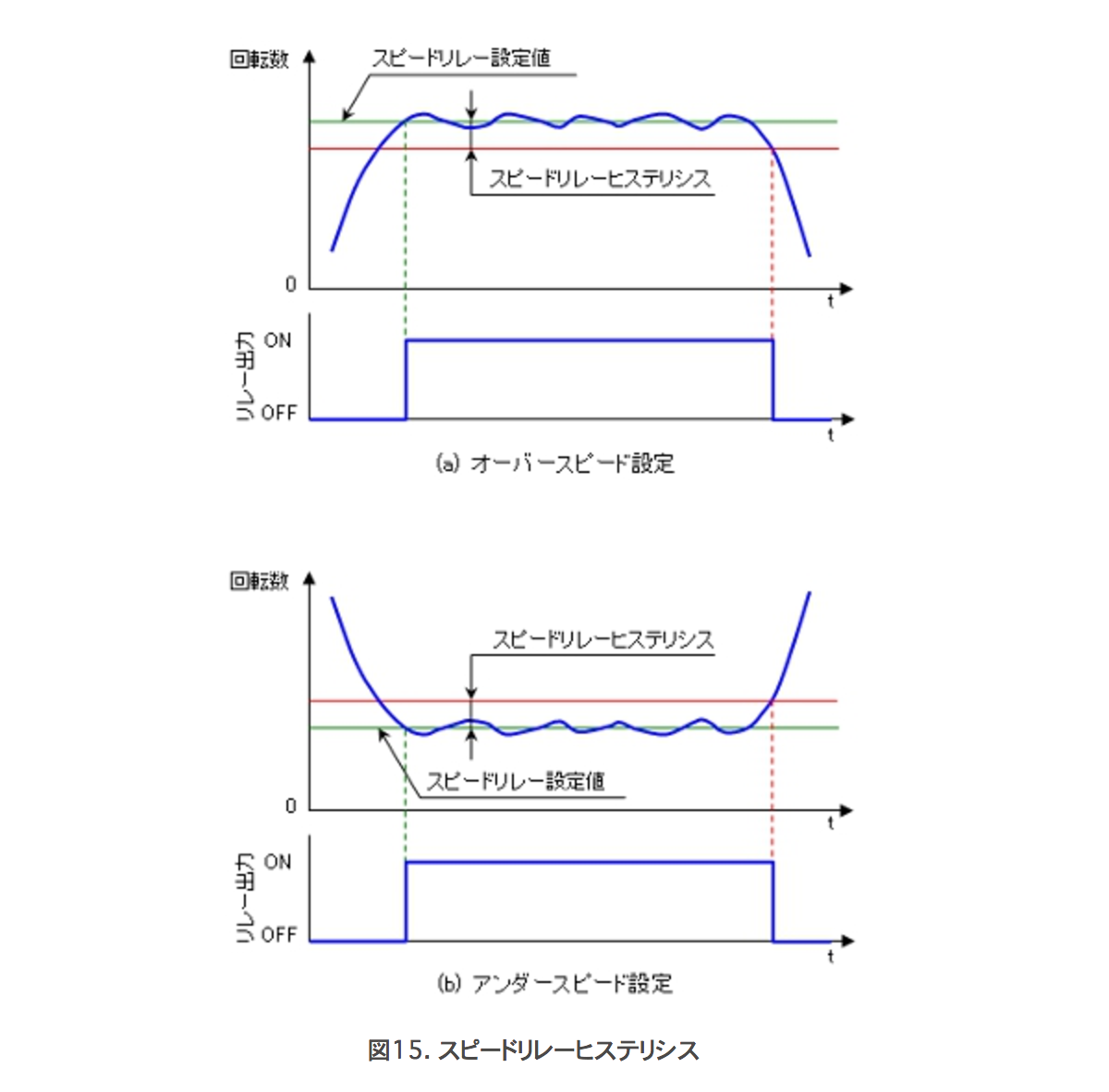
また、回転モニタにはもうひとつのヒステリシスである「スピードリレーヒステリシス」がありますので混同しないように注意が必要です。
これは図15に示すように、回転モニタの警報接点出力であるスピードリレーが自動復帰モードの場合に、回転数がスピードリレー設定値付近で上下を繰り返した場合の接点のチャタリングを防ぐための機能で、VM-5SやVM-703Bではそれぞれのスピードリレー設定値に対して、0~100rpmの範囲でスピードリレーヒステリシスを設定することができます。
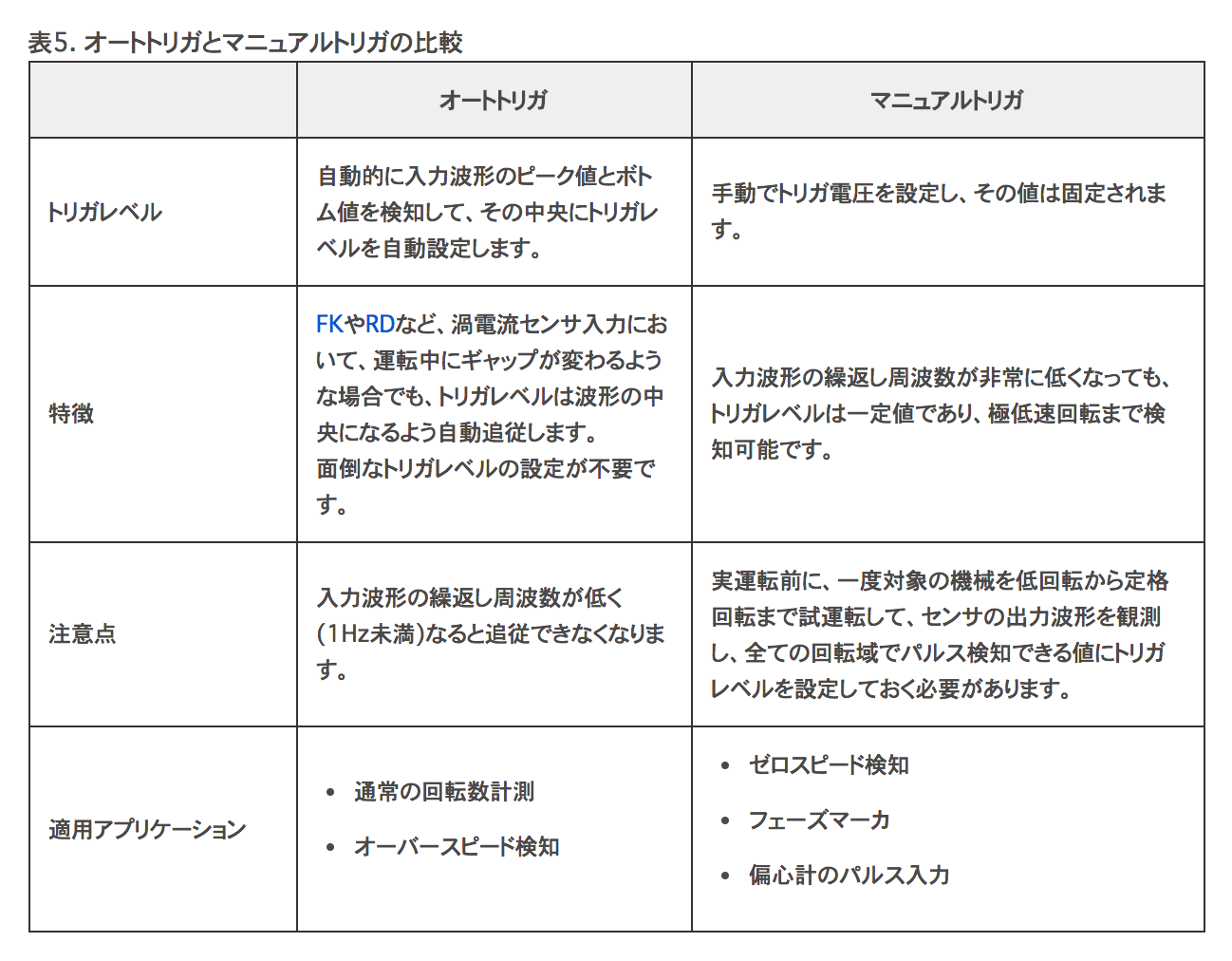
オートトリガとマニュアルトリガ
トリガレベルとは、上記の説明でも出ていますが、モニタの入力電圧がトリガレベルより高い時は出力をON、[トリガレベル] – [ヒステリシス]より低い時はOFFとしてパルスを整形するための比較基準電圧となるものです。
回転モニタには、トリガ方式の選択として「オートトリガ」と「マニュアルトリガ」があり、それぞれに特徴がありますので、パルス誤検知を防いで正しく計測するためには、個々のアプリケーションに応じて適切に選択する必要があります。
それぞれの特徴を表5に示します。
通常の回転数計測であればほとんどの場合オートトリガで問題ありませんが、入力波形の周波数が非常に低くなるゼロスピード検知やパルス状波形入力のデューティ比が10%未満(または90%を超える値)となるような1パルス/1回転の位相基準信号検知(フェーズマーカ)などの場合にはマニュアルトリガによる設定が必要となります。
回転モニタのその他の機能
回転モニタには、回転数の計測だけでなく下記のような機能もあります。
回転加速度計測
回転数(回転速度)の時間的変化、つまり回転数(回転速度)を微分した値を回転加速度として計測します。
単位はrpm/minで表し、加速中はプラス、減速中はマイナスになります。
逆転検知(リバースローテーション)
ひとつの回転パルス検出用歯車に対して、2個の渦電流式変位センサを取り付けますが、この時、2つのセンサで検出する回転パルスの位相差が90度(または270度)となるようにセンサ間の角度を設定します(この角度は回転パルス検出用歯車の歯数により変わります)。
このように設定することで、2つのセンサで検出する回転パルスの位相差により回転方向を検知することができます。
ポンプの逆転検知などに適用されます。
VM-7モニタの場合、ひとつの機種(VM-703B回転&偏心モニタモジュール)で回転数計測だけでなく、回転加速度計測と逆転検知機能も含まれますが、VM-5モニタの場合は、通常の回転モニタがVM-5S、回転加速度計測用がVM-5R、逆転検知用がVM-5Qというように機種が分かれています。
出典:『技術コラム 回転機械の状態監視や解析診断』新川電機株式会社
![]()