![]()
2017/7/4 ものづくりニュース
【状態監視モニタ】Vol.3 スラストモニタの働き
前号、前々号は振動モニタに関して説明しましたが、今回は軸位置監視用に使用されるスラストモニタ(軸位置モニタ)に関して説明します。
このスラストモニタの信号処理の流れと機能を理解することで、変位測定系の他のモニタ、例えば伸び差モニタやバルブ位置モニタ等の基本的な信号処理の理解にもつながるものと思います。
はじめに、スラストモニタとは2010年5月号(API 670規格概要 vol.2 モニタシステム その1)の図5に示すP1,P2の軸位置センサを入力するモニタであり、回転機械のスラストベアリングのクリアランスを監視するものです。
前々号の軸振動モニタのブロック図(図1)と同様に、図3にスラストモニタの1CH分のブロック図を示し、ブロック図に付記した番号に沿って、その機能を説明します。
これにより、スラストモニタがおおよそどのような働きをしているのかお分かりいただけると思います。
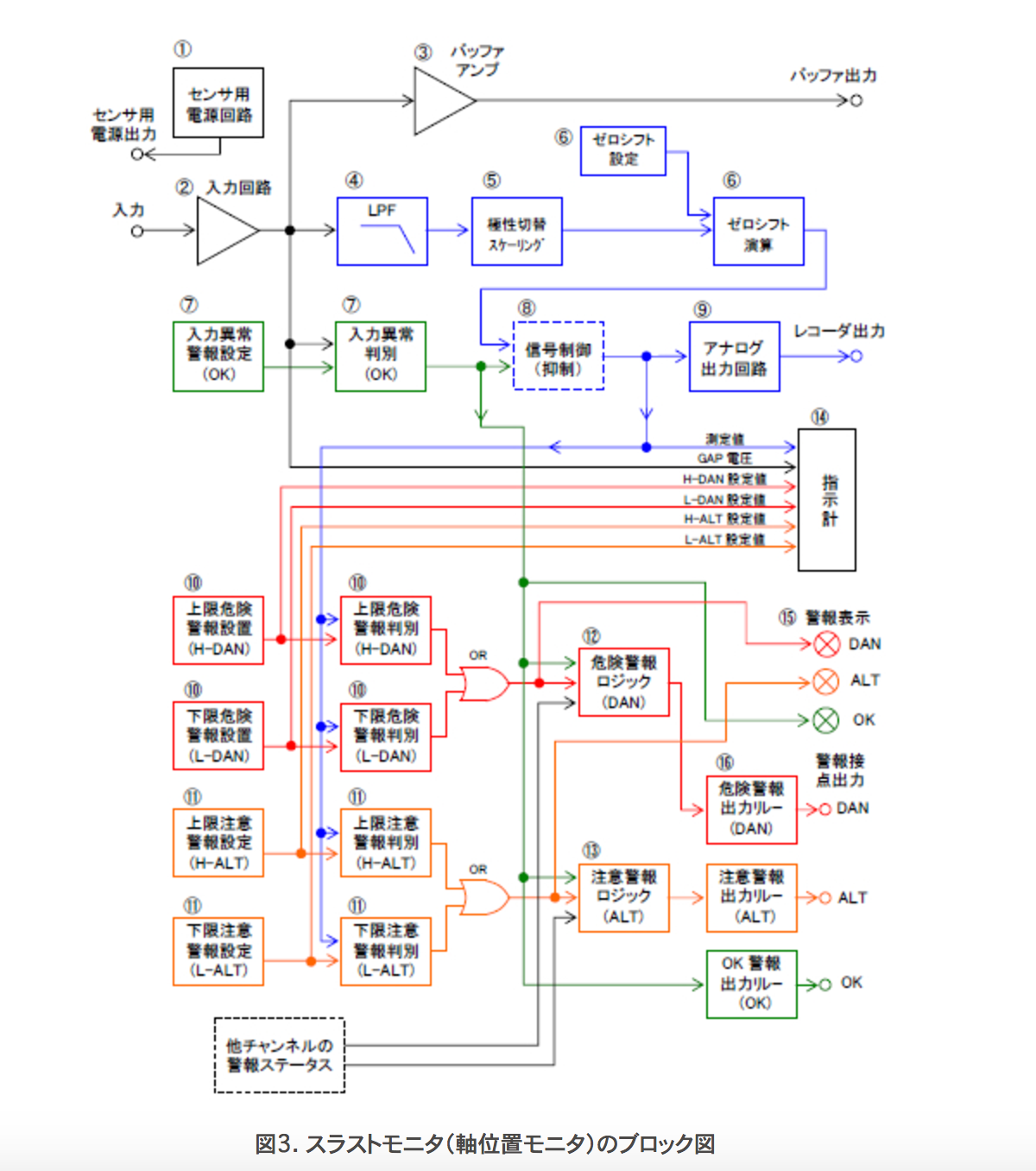
※このブロック図はアナログ処理ベースのスラストモニタをイメージして書かれていますが、デジタル処理ベースのモニタにおいても各機能および処理の流れは基本的に同様です。
※このブロック図はスラストモニタの基本的な機能を示すものであり、詳細機能まで全ての機能を網羅したものではありません。
1.センサ用電源回路
スラストモニタに接続されるセンサを駆動するための電源です。
軸位置計として利用される渦電流式変位センサ(例えばFK-202Fトランスデューサ)を接続するスラストモニタの場合、-24VDCのセンサ用電源を出力します。
2.入力回路
渦電流式変位センサ(例えばFK-202Fトランスデューサ)を接続します。
3.バッファアンプ
入力信号(振動波形)をそのまま出力するためのゲイン1倍のアンプです。
バッファ出力は誤操作により短絡した場合でも、スラストモニタの計測、監視機能に影響を与えないように設計されています。
4.LPF(ローパスフィルタ)
不要な高域成分をLPFでカットします。
5.極性切替/スケーリング
ターゲットがセンサに近づく方向でレコーダ出力および表示を増大させるか減少させるか、要求仕様に合わせて極性を設定します。
また、指定のモニタレンジに合わせてスケーリングします。
6.ゼロシフト設定/ゼロシフト演算
実ギャップにおける規準ギャップ(ゼロ点)とモニタスケール上のゼロ点を合わせるための信号のシフトを行ないます。
7.入力異常警報設定/入力異常判別(OK)
上下限の警報設定値を設け、入力信号がこの範囲を外れた場合は入力センサまたは結線の異常と判断してOK警報を発します(Not-OK状態)。
警報設定値はセンサの種類や本質安全防爆の有無によって変わります。
センサセットギャップの過大、過少、センサ/延長ケーブルの断線、短絡、ドライバの故障、伝送ケーブルの断線、短絡等により入力異常警報設定範囲を逸脱して入力異常状態(Not-OK状態)と判断します。
8.信号制御(抑制)
通常状態では、⑤⑥により演算処理された信号をそのまま下流の処理ブロックに出力しますが、信号抑制を有効に設定している場合には、入力異常状態において信号を振幅の0%または0Vに抑制します。
ただし、スラストモニタの標準設定において信号抑制は無効としていますので、入力異常状態においても⑤⑥により演算処理された信号はそのまま下流の処理ブロックに出力されます。
9.アナログ出力回路
スラスト計測値(軸位置)に比例した電流(4~20mADC)または電圧(1~5VDC)信号に変換して出力します。
10.上限・下限危険警報設定/危険警報判別(H-DAN, L-DAN)
任意に設定された上限・下限警報設定値とスラスト(軸位置)の計測値を比較して、スラスト計測値が上限または下限の警報設定値を一定時間(警報遅延時間:通常1~3秒程度に設定)以上超えると危険警報状態と判断します。
11.上限・下限注意警報設定/注意警報判別(H-ALT, L-ALT)
任意に設定された上限・下限警報設定値とスラスト(軸位置)の計測値を比較して、スラスト計測値が上限または下限の警報設定値を一定時間(警報遅延時間:通常1~3秒程度に設定)以上超えると注意警報状態と判断します。
12.危険警報ロジック(DAN)
自らのチャンネルの危険警報判別結果だけでなく、他のチャンネルの警報ステータス(DAN, ALT, OK)も含めてあらかじめ設定されたロジックに沿って危険警報出力リレーを動作させるための信号を出力します。
13.注意警報ロジック(ALT)
自らのチャンネルの注意警報判別結果だけでなく、他のチャンネルの警報ステータス(DAN, ALT, OK)も含めてあらかじめ設定されたロジックに沿って注意警報出力リレーを動作させるための信号を出力します。
14.指示計
測定値、GAP電圧、上限危険警報設定値、下限危険警報設定値、上限注意警報設定値、下限注意警報設定値を表示します。
15.警報表示灯(DAN, ALT, OK)
警報判別ブロック⑦⑩⑪において警報状態と判断した場合、対応する表示灯が点滅します。
なお正常状態において、DAN表示灯(赤)とALT表示灯(橙)は消灯、OK表示灯(緑)は連続点灯します。
16.警報出力リレー(DAN, ALT, OK)
危険警報と注意警報はそれぞれの警報ロジック出力がON(警報状態)になると対応する警報出力リレーが警報状態となります。
OK警報は入力異常判別⑦でNot-OK状態と判断するとOK警報出力リレーが警報状態となります。
具体的な各ブロックの動作条件等の詳細説明はしていませんので、細かい動作は分かりにくい面もあるかもしれませんが、図3のブロック図と上記のブロック毎の説明である程度、軸位置計測用のスラストモニタの働きを掴んでいただけたのではないかと思います。
出典:『技術コラム 回転機械の状態監視や解析診断』新川電機株式会社
![]()