![]()
2017/8/29 ものづくりニュース
【振動解析と診断】vol.3 オービットとポーラ線図
前回は代表的な解析グラフとして、トレンドグラフ、オービット、スペクトル、ボード線図、ポーラ線図を紹介しました。
今回はその中で、見た目はよく似ていても、その演算処理や意味合いの全く異なる「オービット」と「ポーラ線図」に関して、両者の違いや意味合いについてもう少し詳しく説明します。
オービットとポーラ線図
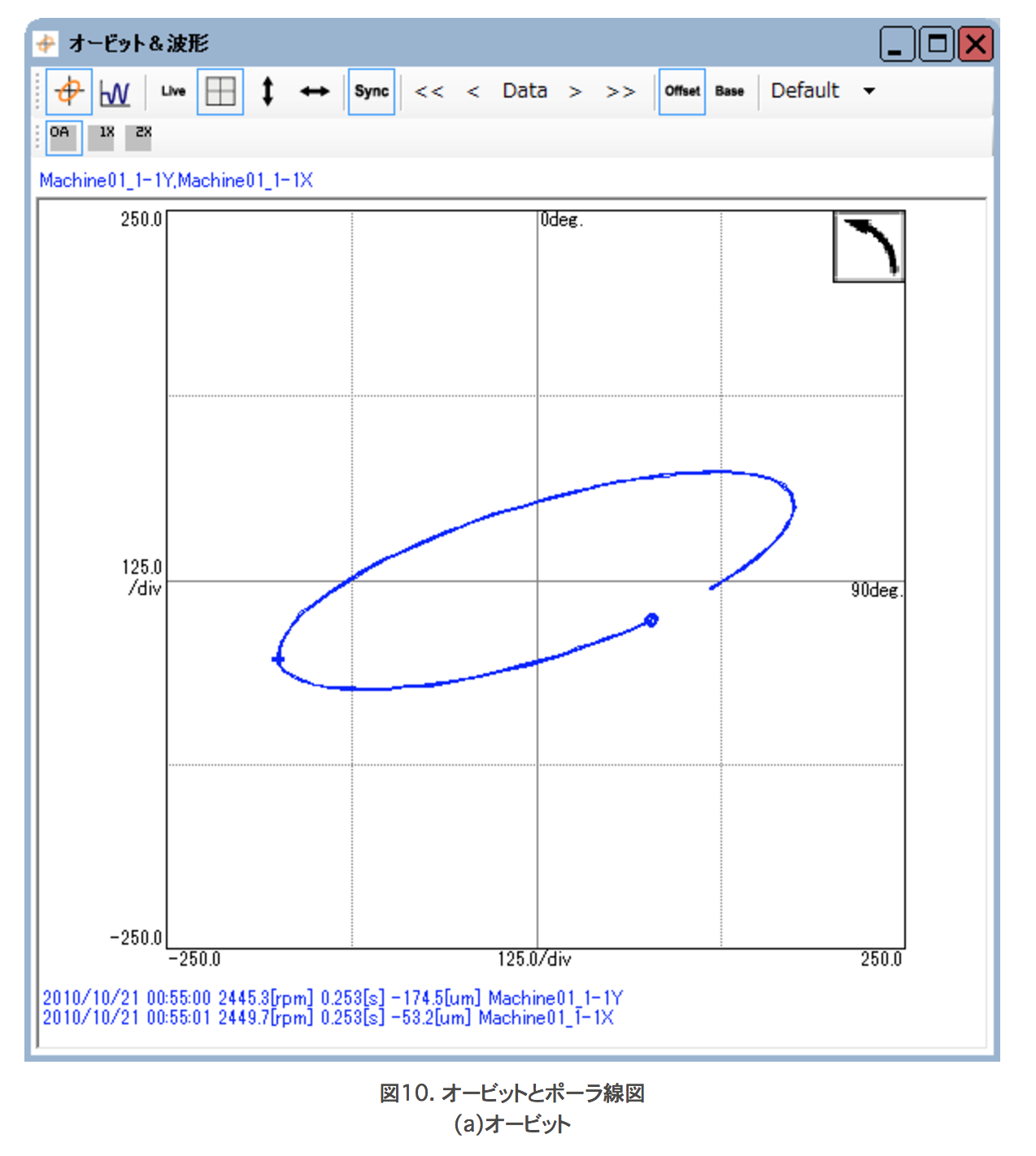
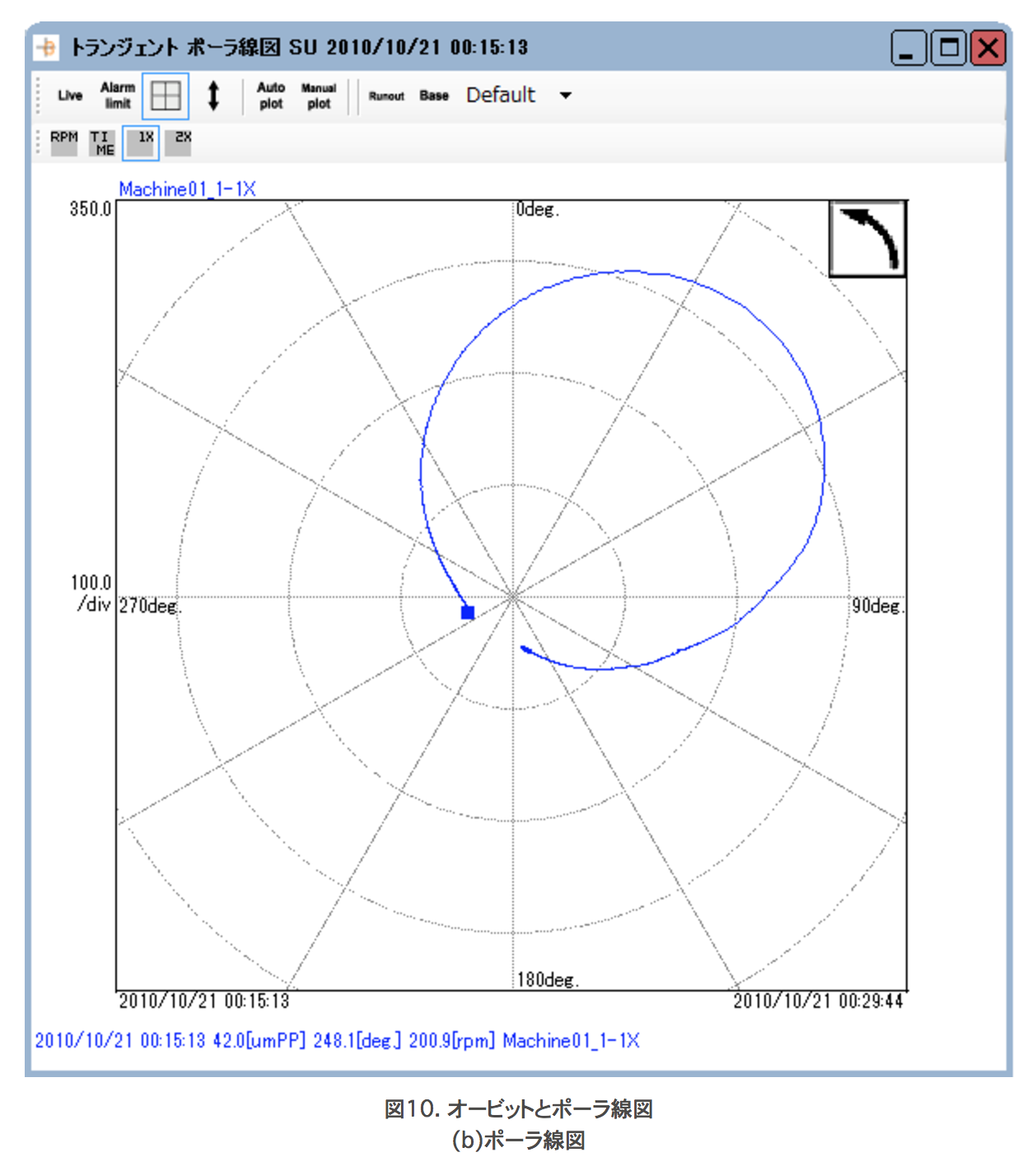
前回、図4と図8でも紹介していますが、もっとよく見比べていただくために図10の(a)と(b)をご覧ください。
図10 (a)のオービットと図10 (b)のポーラ線図、一見すると似ているのでひょっとすると混同されている方もいるかもしれません。
実際、20年以上前にX-Yレコーダを使ってポーラ線図を描かせるための解析機器として開発されたVM-13Vベクトルモニタを発売開始した当初、社内の営業マンでも勘違いしている人が多く、どうしてX-Y方向に2個のセンサをつけなくても1方向の軸振動センサでポーラ線図を描けるのかとか、どうしてフェーズマーカ(位相基準)がないとポーラ線図を描けないのかといった質問を受けました。
まず、図10を見て、よく似ている点は何でしょう。
類似点を列挙してみると、
・正方形のグラフエリア上に円とか楕円のようなデータが表示されている。
・???
あれ? パッと見よく似ているように見えて、実は異なる部分の方が多そうです。
そこで、表1にオービットとポーラ線図の概要をまとめてみましたが、これを見ると全く違うものであることがよく分かると思います。
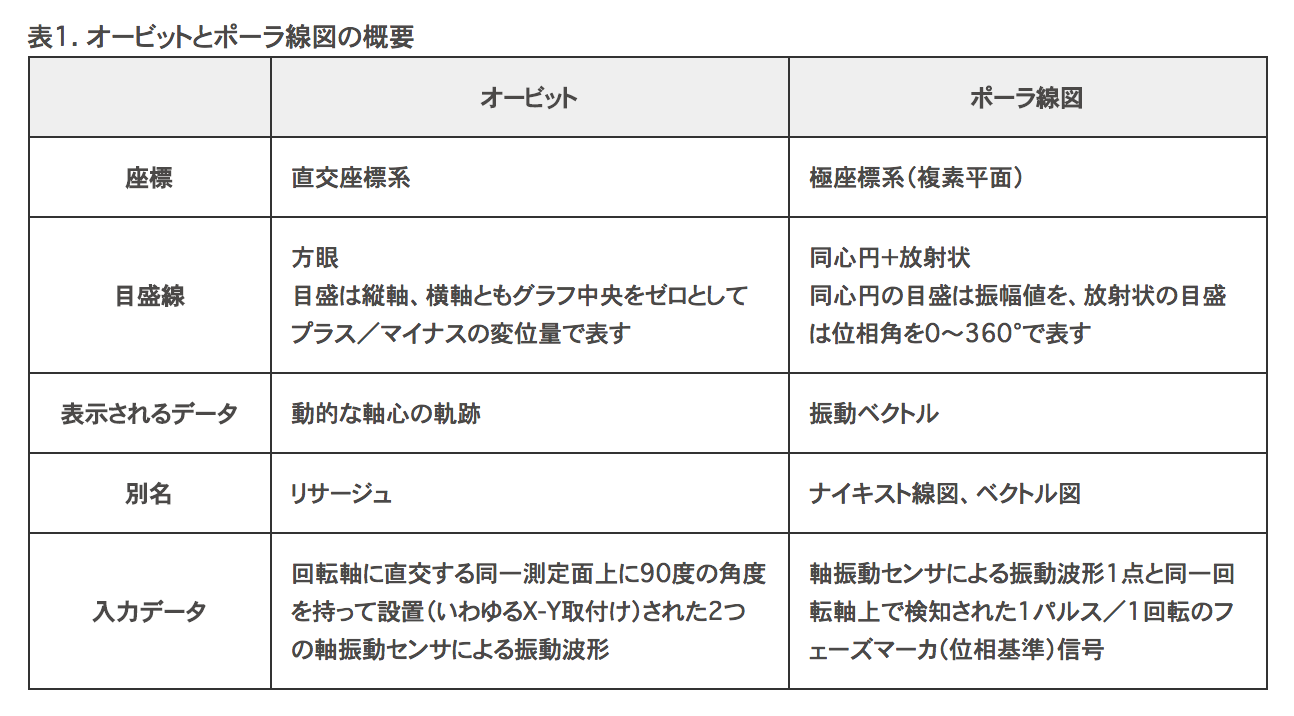
オービットは軸心位置の瞬時値を連続的に直交座標系に表したもの、つまり動的(ダイナミック)な軸心の軌跡を直交座標系に表したものです。
この動的な軸心の軌跡がオービットと呼ばれる由縁ですが、描画処理の観点からリサージュとも呼ばれます。
これに対して、ポーラ線図は、振動波形から抽出した回転同期成分(または回転同期の2倍の周波数成分)の振幅値と位相角を極座標で表したものであり、同心円の目盛線が振幅値を表し、放射状の目盛線が位相角を表しています。
複素平面表示であることからナイキスト線図と呼ばれたり、振動ベクトルを表していることからベクトル図とも呼ばれます。
最新の解析システムを使わない測定・描画方法
更に、それぞれのグラフの意味合い、両者の違いを理解していただくために少しクラシックな測定・描画方法を使って説明します。
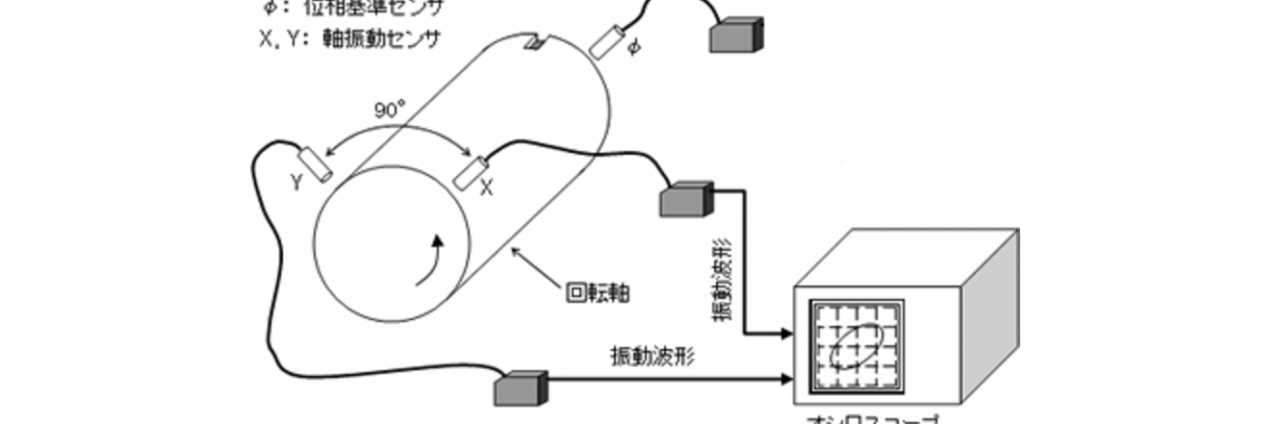
まず、図11にオシロスコープを使ったオービットの計測方法を示しています。

オービットは図のように、90度離して取り付けられた軸振動センサXとYで測定した振動波形をオシロスコープの水平軸と垂直軸に入力することで描画することができます。
オシロスコープは通常、水平軸に時間、垂直軸に入力信号の瞬時値をプロットして行きますが、ここでは水平軸にXの振動波形信号を、垂直軸にYの振動波形信号を入力してリサージュ、つまりオービットを描かせるようにしています。
なお、infiSYS RV-200やKenjinなどの振動解析システムでは、更にオービット上にフェーズマーカ(位相基準)の位置を示すとともに、フェーズマーカ直前のプロットをブランクにすることで、オービットの回転方向が分かるようにしています。
余談になりますが、図11の軸振動計測において、XとYそれぞれの振動波形をローパスフィルタに通して振動波形の平均値、つまり静的(スタティック)なデータとしてオシロスコープではなく、X-Yレコーダに入力することで、静的な軸心の軌跡である軸軌跡(Shaft Centerline Plot)を描画することができます。
次に、図12にベクトルモニタとX-Yレコーダを使ったポーラ線図の作成システムを示しています。
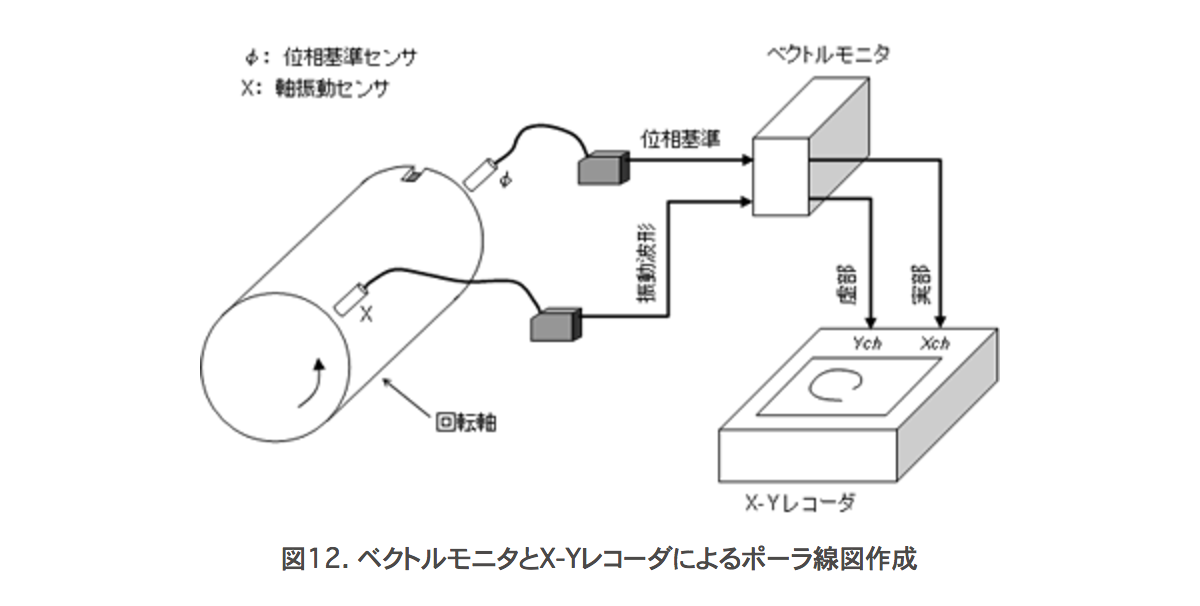
ここにはベクトルモニタという特別な機器が登場していますが、ベクトルモニタは、位相基準信号に同期して中心周波数が変化する狭帯域のトラッキングフィルタにより、振動波形から回転同期成分の抽出を行っています。
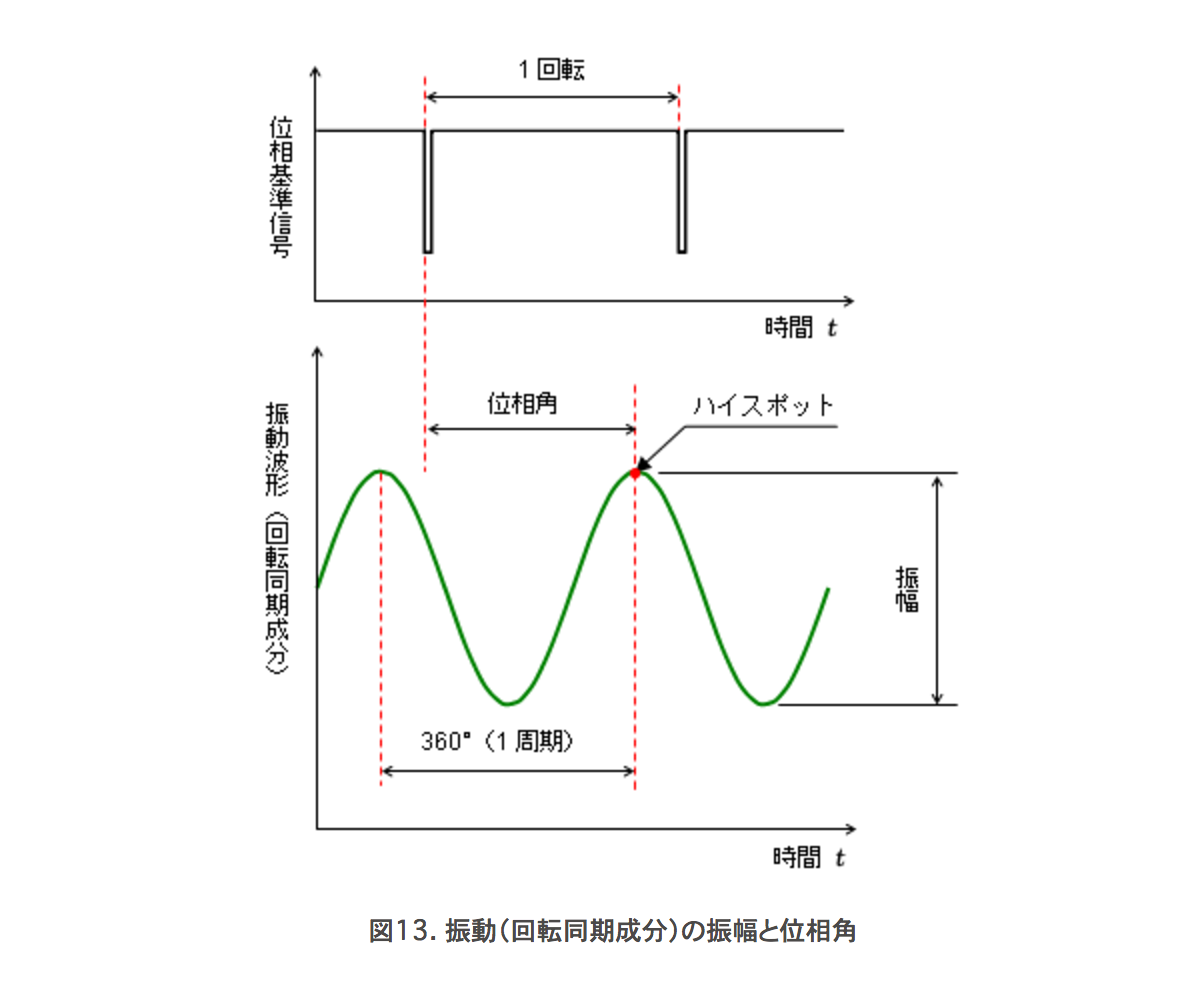
図13に抽出された回転同期成分の振動波形信号と位相基準信号のイメージを示していますが、ベクトルフィルタではこの図に示す振幅値と位相角を演算し、さらにそれを複素平面に展開した場合のグラフのX軸である実部(Real part)とY軸である虚部(Imaginary part)の値に演算して出力しています。
この実部の値をX-YレコーダのXchに、虚部の値をYchに入力することで、ポーラ線図を作成することができます。
なお、図13に示すハイスポットとは、調和振動において測定対象の回転軸が軸振動センサに最も近づく点のことです。
この図では軸振動センサはX方向1点のみの設置の絵になっていますが、実際の機械では図11のようにY方向にも軸振動センサが設置されていることが一般的です。
ポーラ線図は図12のようにX方向の軸振動センサと位相基準センサの組合せで生成されるだけでなく、Y方向の軸振動センサと位相基準センサの組合せでも生成することができます。
このように同一回転軸上で位相基準を検知するセンサが設置されていれば、全ての軸振動センサで計測した振動波形に対する振動ベクトルを計測してポーラ線図を描画することができます。
しかし、これは軸振動センサによる振動波形1点と同一回転軸上で検知された1パルス/1回転のフェーズマーカ(位相基準)信号により算出されるものであり、X方向とY方向の軸振動センサの組合せにより生成されているものではないことがお分かりいただけると思います。
軸振動センサの取付方向のX,YやグラフのX軸とY軸、更にX軸,Y軸といってもオービットがプロットされる空間位置を表す直交座標系の場合と、振動ベクトルがプロットされる複素平面の場合など、異なる意味のX,Yが登場することも分かりにくくしている要因かもしれません。
軸心の軌跡の空間位置をイメージできるオービットは比較的分かりやすいと思いますが、振動ベクトルという複素平面で表現されるポーラ線図の方は、その意味を理解しないとなかなか分かりにくいのではないかと思います。
振動ベクトルのプロットであるポーラ線図をより深く理解するためには、図13に示したハイスポットだけでなく、加振力となるヘビースポット(重心点)の方向との関係なども理解する必要があるかと思いますが、その説明はまた別の機会とさせていただきます。
次回はロータキットを使った異常振動の解析事例を紹介する予定です。
出典:『技術コラム 回転機械の状態監視や解析診断』新川電機株式会社
![]()