
![]()
2017/1/31 ものづくりニュース
【回転機械の状態監視】vol.2 渦電流式変位センサの原理
各種産業分野で多くの回転機械が使われており、その中でも重要なものに関しては機械の状態、特に振動の定期的な監視や常時監視が行われ、効率的なメンテナンスや異常解析、診断などに利用されています。
今回は、API 670適用アプリケーションやTSI用として最も多く使われている渦電流式変位センサの原理について説明します。
渦電流式変位センサの原理
渦電流式変位計は写真2に示すように、内部先端部にコイルを持つセンサ部と発振・検波等の電子回路からなる変換器(ドライバ)、およびセンサと変換器をつなぐ専用の同軸ケーブル(延長ケーブル)から構成されています。
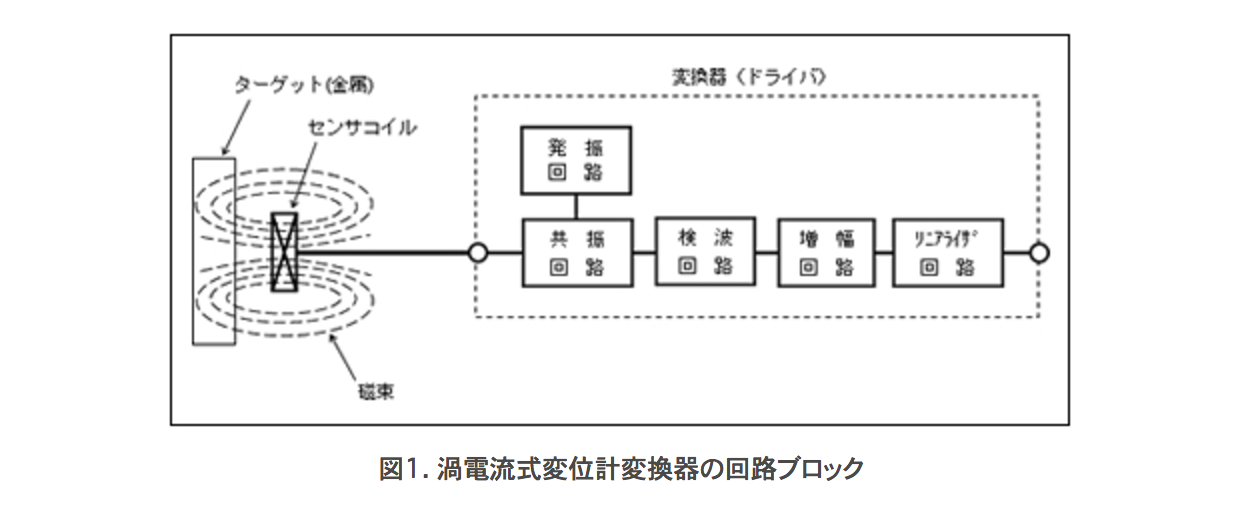
変換器内部は図1に示すように、発振回路、共振回路、検波回路、リニアライザ等で構成され、発振回路からセンサコイルに対して高周波(数MHz)の信号を供給しています。
これによりセンサコイルから高周波磁束を発生し、この磁界中にターゲットとなる金属が近づくと、その金属の表面に渦電流が発生します。
この渦電流の大きさはセンサコイルと金属との距離により変化し、その変化により変換器側から見たターゲット金属を含むセンサコイルのインピーダンスが変化します。
したがって、センサとターゲット間の距離の変化をセンサのインピーダンス変化としてとらえることができ、これを共振回路出力の電圧変化として取り出して、検波回路により距離に対応した直流電圧に変換することができます。
通常の変位計では更にリニアライザ回路により直線化して距離に比例した電圧として出力しています。
渦電流式変位計は、直流(静止した状態の距離)から高い周波数まで応答するため、軸位置計測のような変位測定は勿論、振動計測にも適用できます。
更に回転検知ギヤやキー溝に対向させることにより回転数計測や位相基準(フェーズマーク)検出にも適用可能です。
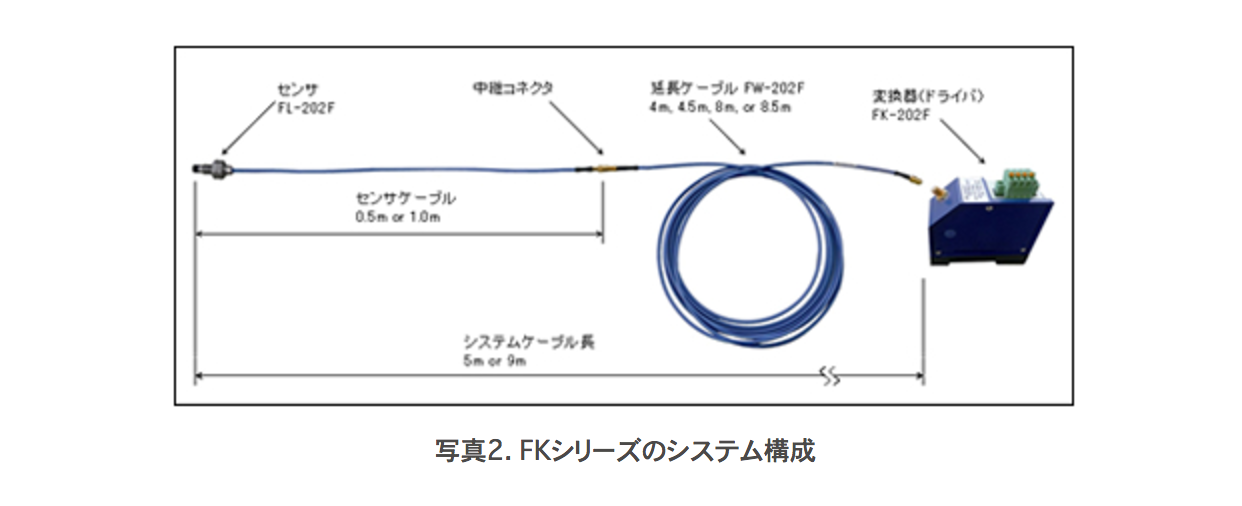
これらの計測に適用可能なAPI 670 (4th Edition)に準拠したFKシリーズ非接触変位・振動トランスデューサを写真1(前号掲載)と写真2に示します。
さて、渦電流式変位センサは基本的にセンサとターゲットとの距離(ギャップ)を測定する変位計ですが、変位計でなぜ振動計測ができるのかを以下に説明します。
渦電流式変位センサの周波数応答はDC~10kHz程度までと広く、通常の軸振動計測で対象となる数十Hzから数百Hzの範囲では距離(センサ入力)の変化に対する変換器の出力は一対一で追従します。
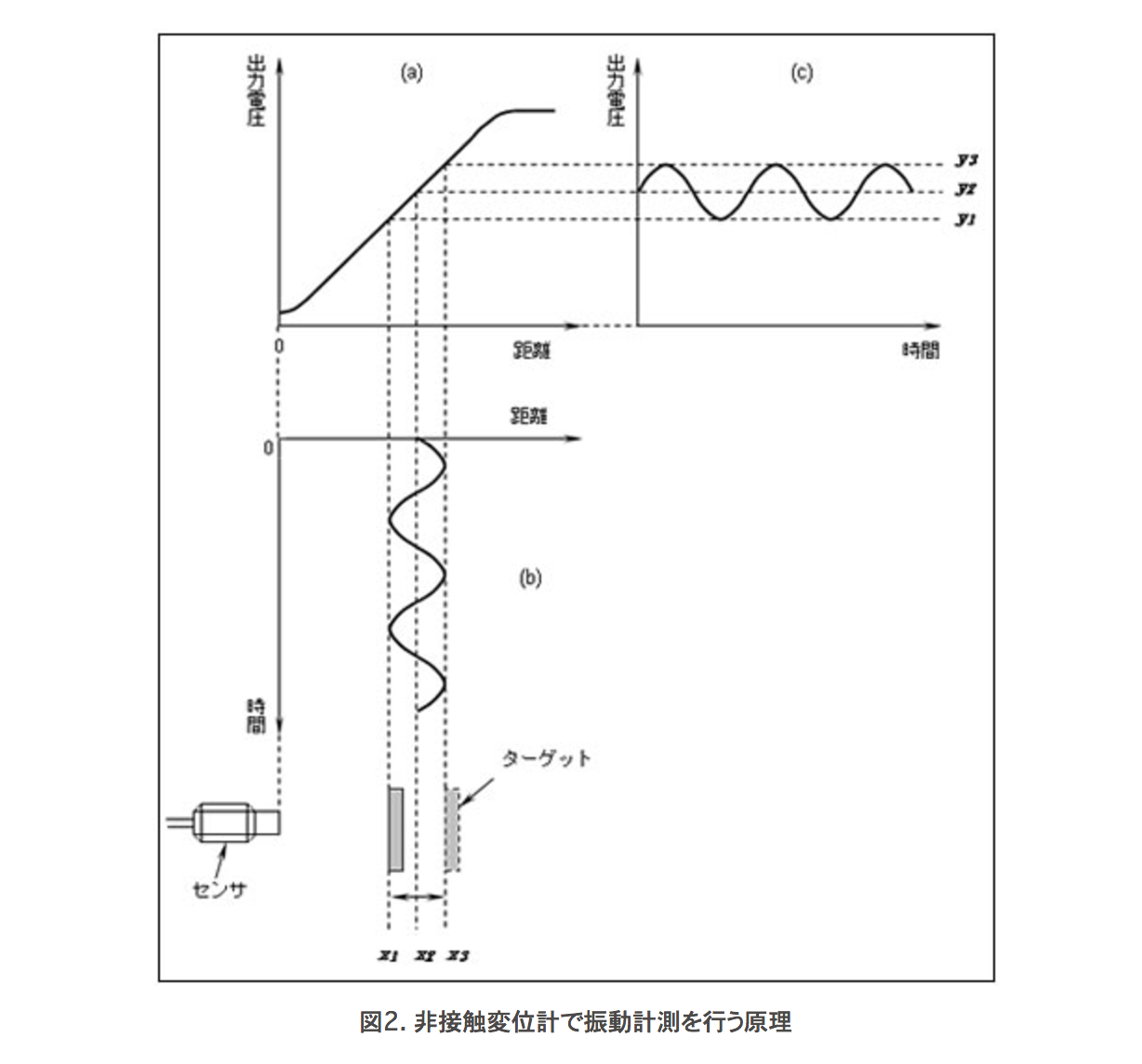
渦電流式変位計の静特性は図2の(a)に示すように使用するレンジ内で距離に比例した電圧を出力します。
仮にターゲットがx2を中心にx1からx3の範囲で振動している場合、時間に対する距離の変化は図2の(b)に示され、変換器の出力電圧は図2の(c)のように時間に対する電圧波形となって現れます。
この時、出力電圧y1、y2、y3に対する距離x1、x2、x3は既知の値で比例関係にあり、振動モニタなどによりy3とy1の偏差(y3-y1)を演算処理することにより振動振幅を測定することができ、通常この値を監視します。
また、変換器の出力波形は振動波形を示しているため、波形観測や振動解析に用いられます。
次回は、センサの信号を受けて、それを各監視パラメータに変換、監視する装置とシステムに関して説明します。
出典:『技術コラム 回転機械の状態監視や解析診断』新川電機株式会社
![]()