
![]()
2017/5/9 ものづくりニュース
【回転パルス検出センサと位相基準センサ】vol.2 渦電流センサと電磁ピックアップの比較
前回は回転パルスおよび位相基準パルス検出への渦電流式変位センサの適用について説明しましたが、今回は大型回転機械の回転パルス検出に渦電流センサと並んでよく適用される電磁ピックアップについて説明し、さらに両者の比較を行ないます。
電磁ピックアップによる回転パルス検出方法
電磁ピックアップは、図3(a)に示すように、検出コイルとポールピースとマグネットから構成されていて、検出歯車として鉄鋼材などの磁性体のインボリュート歯車を使います。
ここで、検出歯車が回転すると、磁性体である検出歯車の山の部分が電磁ピックアップのポールピースに近づいたり離れたりを繰り返すことになります。
これによりマグネットとポールピースで構成された磁路の状態が変化し、検出コイルを貫通する磁束が変化することになります。
検出歯車の山の接近に伴い磁束が増えて行き、遠ざかるとともに減って行くという状態を繰り返すことになりますが、この時(式1)に示すファラデーの電磁誘導の法則で示される誘導起電力を発生することになります。
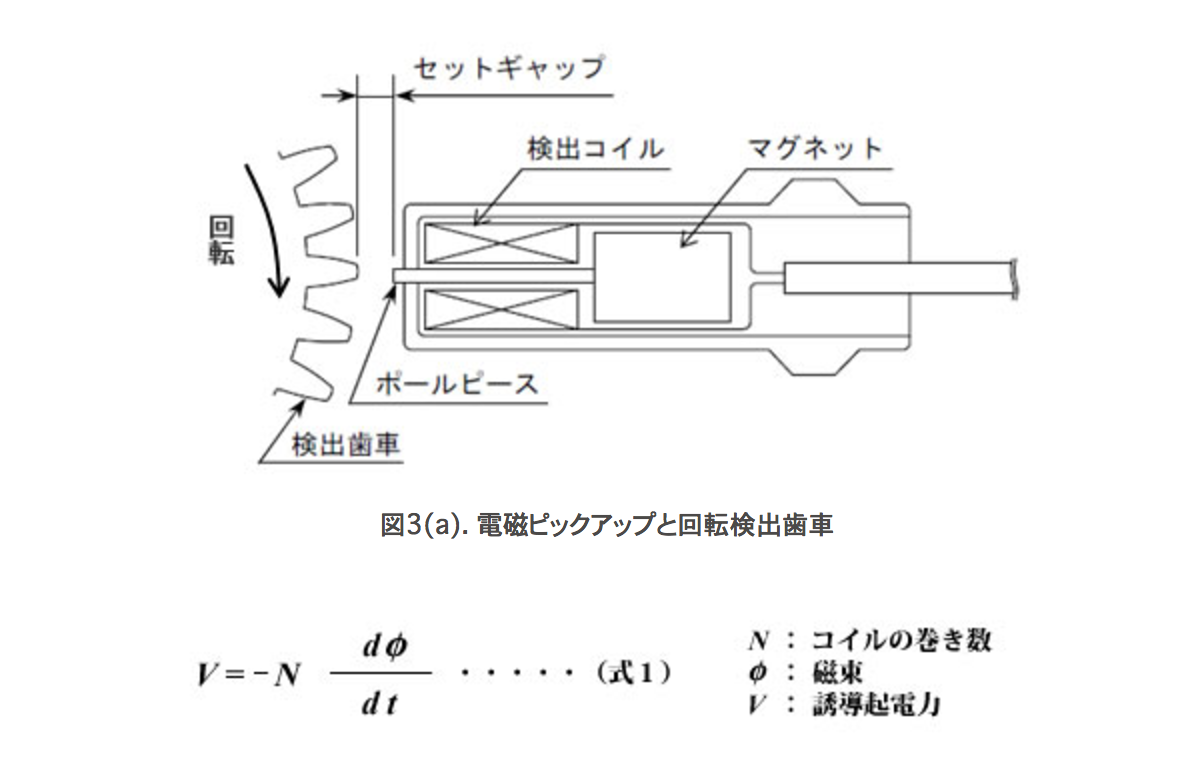
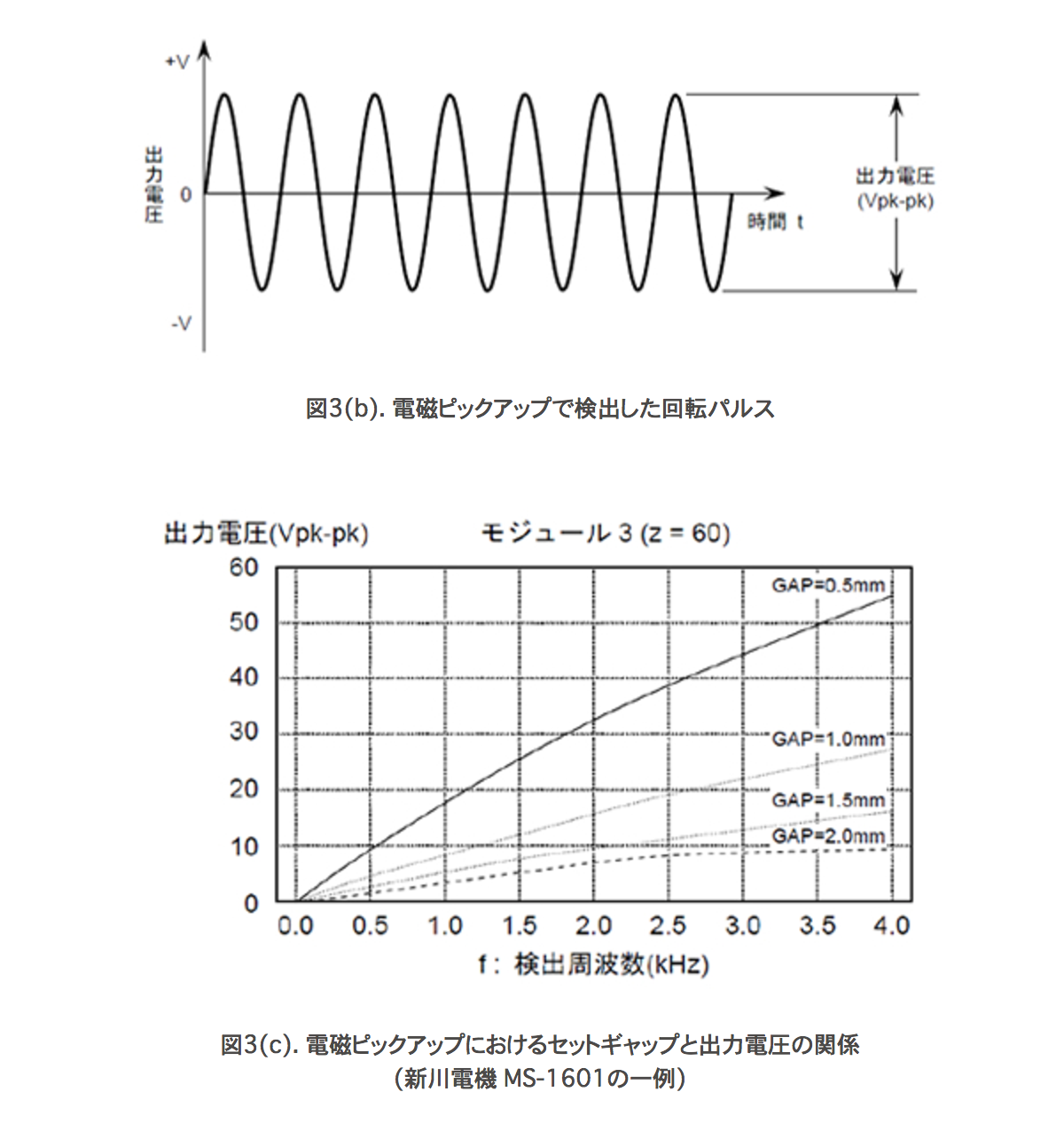
(式1)より検出コイルに発生する起電力は磁束を微分したものに比例しますので、検出歯車の回転によりコイルを貫通する磁束が連続的に増減を繰り返すことで、コイルに発生する起電力も図3(b)に示すように極性を変えながら増減を繰り返すこととなります。
このパルス列の繰り返し周波数は回転数に比例しますので、前回説明した渦電流式変位センサの場合と同様に、TSIモニタの回転モニタで波形整形、パルスカウント、周期計測などの信号処理を行なって、回転数を計測することができます。
しかし、電磁ピックアップの場合、回転パルスの波高値である図3(b)に示す出力電圧(Vpk-pk)は、セットギャップが広くなれば小さくなり、回転数が早くなると大きくなるような特性を示します。
この一例として図3(c)に新川電機 MS-1601電磁ピックアップの検出周波数に対する出力電圧(Vpk-pk)の特性を示します。
この特性より、電磁ピックアップは、セットギャップを大きく取ったり、低い回転数計測に対しては不向きであることが分かります。
また逆に、狭いセットギャップにおいて高速回転数になると非常に高い出力電圧を発生する可能性がありますので、この信号を受ける回転モニタの入力回路は予想される高い入力電圧に対する保護を考慮しておく必要があります。
電磁ピックアップ用の検出歯車としては磁性体のインボリュート歯車が適用されていますが、これは歯車の回転とともに、連続的かつ滑らかにギャップの変化が繰り返され、(式1)の磁束φが連続的に増減を繰り返すのに適しているためです。
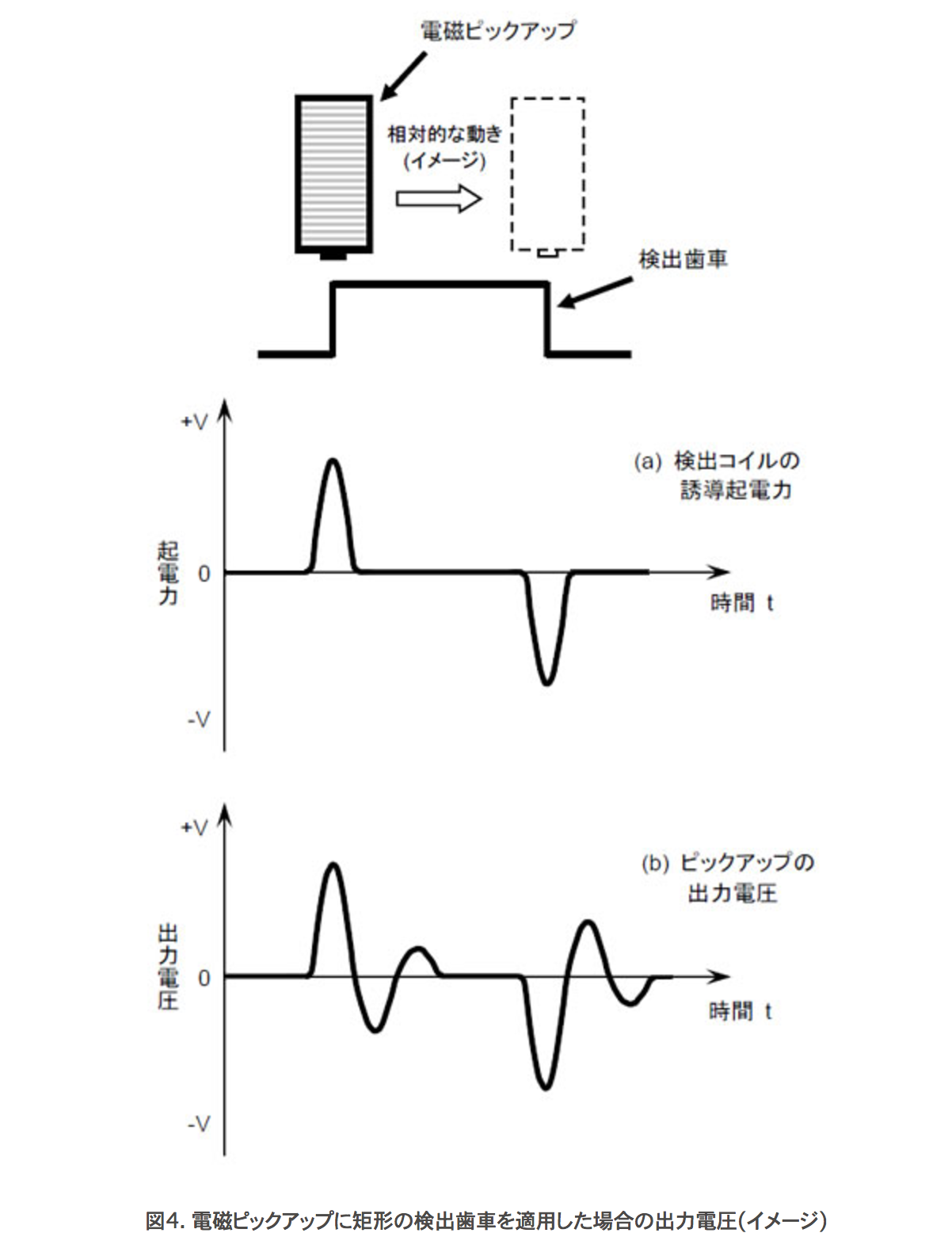
ここで、検出歯車として矩形歯車を適用した場合、どのような現象が生じるかを考えてみましょう。
図4は検出歯車が矩形の場合の起電力及び出力電圧のイメージを示したものです。
図4の(a)に示すように、電磁ピックアップの下を歯車のエッジが通過する時のみ検出コイルに起電力が発生します。
これは、エッジが通過する部分では磁束変化が生じるものの、ポールピースに比べて十分に広い山の部分、または谷の部分ではギャップ一定となり磁束の変化が生じないため(式1)の誘導起電力Vが発生しなくなるためです。
なお、ここで注意が必要なのは実際の出力波形ということになりますが、実際の検出コイルはインダクタンスのみでなく、抵抗値からも構成されています。
また接続するケーブルのキャパシタンスも回路の構成要素となります。
ここに図4の(a)の単パルス的な信号が入力されると、実際の出力電圧は図4の(b)に示すような減衰振動を起こしたような波形となります。
この状態は回転数により変化しますが、図4の(b)のような波形となった場合には、検出歯車1山あたり2パルス以上カウントしてしまう可能性があります。
この現象は矩形歯車の場合だけでなく、キー溝状ターゲット等で1パルス/回転の位相基準を検出する場合にも発生して問題を生じる可能性がありますので、位相基準センサとして電磁ピックアップを適用することは推奨されません。
渦電流センサと電磁ピックアップの比較
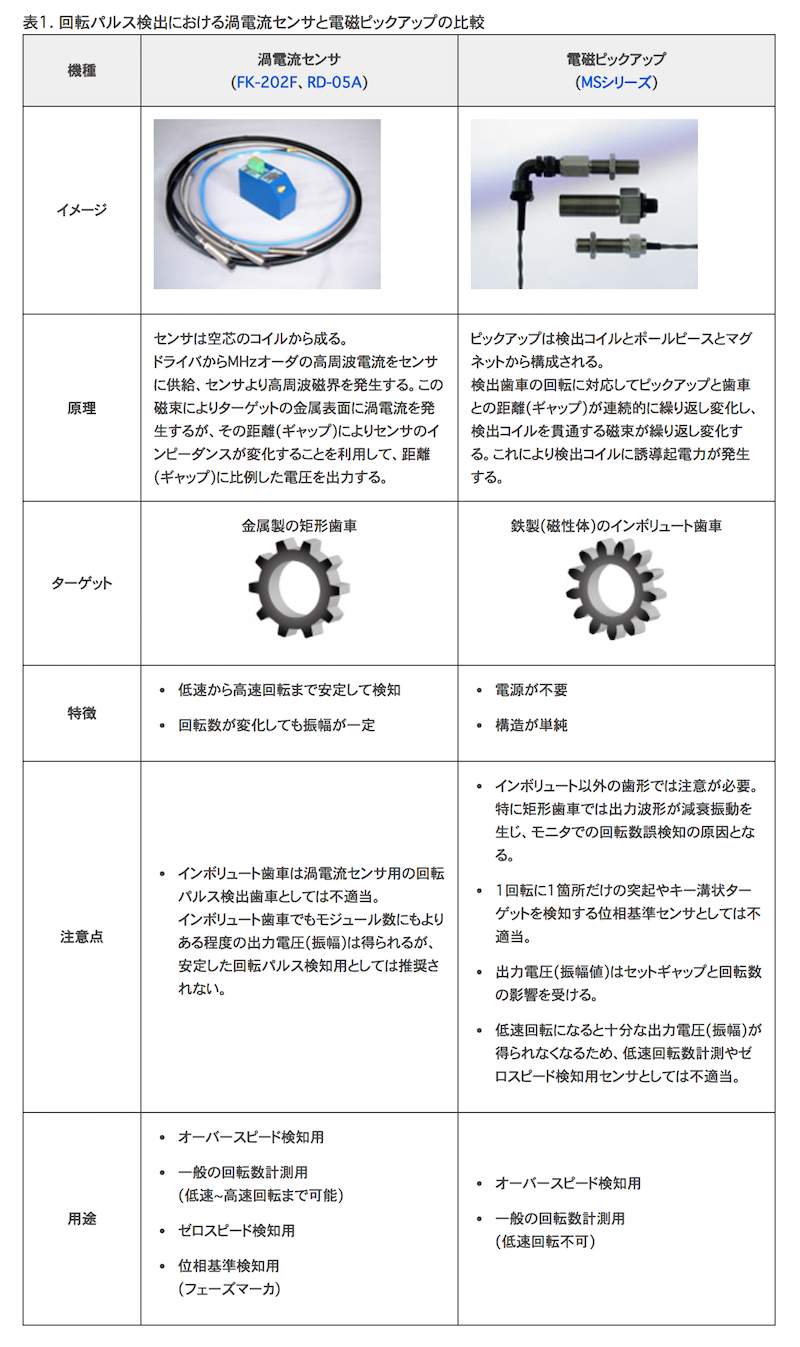
表1に回転パルス検出用センサとして適用する場合の渦電流センサと電磁ピックアップの比較を示しています。
前回説明したように渦電流センサは基本的にDC~10kHz程度まで応答する変位計であり、検出歯車の形状、寸法が適正であれば、極低速回転のゼロスピード検知から高速回転のオーバスピード検知まで幅広く適用できるという大きな特徴がありますが、センサ+延長ケーブル+ドライバという専用のトランスデューサシステムを構成する必要があり、電磁ピックアップに比べて複雑で高価になるという面があります。
これに対して、電磁ピックは電源不要で単体で動作し、構造も単純で、渦電流式のトランスデューサシステムに比べて安価なセンサですが、表1に示すように適用上多くの注意点があり、位相基準用やゼロスピード用センサとしては適用できないという面があります。
出典:『技術コラム 回転機械の状態監視や解析診断』新川電機株式会社
![]()