![]()
2017/4/25 ものづくりニュース
渦電流変位センサの原理と特徴 vol.4 ~ エレクトリカルランナウト~
渦電流式変位センサで回転しているロータの軸振動を計測する場合、実際の軸振動波形、すなわち実際のギャップ変化による変位計出力電圧の変化ではなく、ターゲットの材質むらや残留応力などによる変位計出力への影響をエレクトリカルランナウトと呼びます。
今回はそのエレクトリカルランナウトに関して説明します。
エレクトリカルランナウト
渦電流式変位センサで回転しているロータの軸振動を計測する場合、実際の軸振動波形、すなわち実際のギャップ変化による変位計出力電圧の変化ではなく、ターゲットの材質むらや残留応力などによる変位計出力への影響をエレクトリカルランナウトと呼びます。
エレクトリカルランナウトの要因としては、ターゲットの透磁率むら、導電率むらと残留応力が考えられ、それぞれ単独で考えた場合、ある程度傾向を予測することは出来ても実際のターゲットでは透磁率むらと導電率むらと残留応力が相互に関係しあって存在するため、その要因を分けて単独で考えることはできず、また定量的に評価することは非常に困難です。
ここでは参考としてAPI 670規格における規定値および磁束の浸透深さについて述べます。
また、新川センサテクノロジにおける試験データも一部示して説明します。(試験データは、「新川技報2008」に掲載された技術論文「渦電流形変位センサの出力のターゲット表面状態の物性の影響(旭等)」から引用しています。)
1)計測面(ロータ表面)の表面粗さについて
API 670規格(4th Edition)の6.1.1.2項にターゲットの表面仕上げは1.0μm rms以下であることと規定されています。
しかし渦電流式変位センサの場合、計測対象はスポットではなくある程度の面積をもって見ているため、局部的な凸凹である表面粗さが直接計測に影響する度合いは低いと考えられます。
2)許容残留磁気について
API 670規格(4th Edition)の6.1.1.3項のNoteにおいて「ターゲット測定エリアの残留磁気は±2gauss以下で、その変化が1gauss以下であること」と規定されています。
ただし測定原理や外部磁界による影響等の実験より、残留磁気による影響はセンサに対向する部分の磁束の変化による影響ではなく、残留磁気による比透磁率の変化として出力に影響しているとも考えられます。
しかし実際のロータにおける比透磁率むらの測定は現実的に不可能であり、比較的容易に計測可能な残留磁気(磁束密度)を一つの目安として規定しているものと考えられます。
しかしながら、実験結果から残留磁気と変位計出力電圧との相関は小さいことがわかっています。
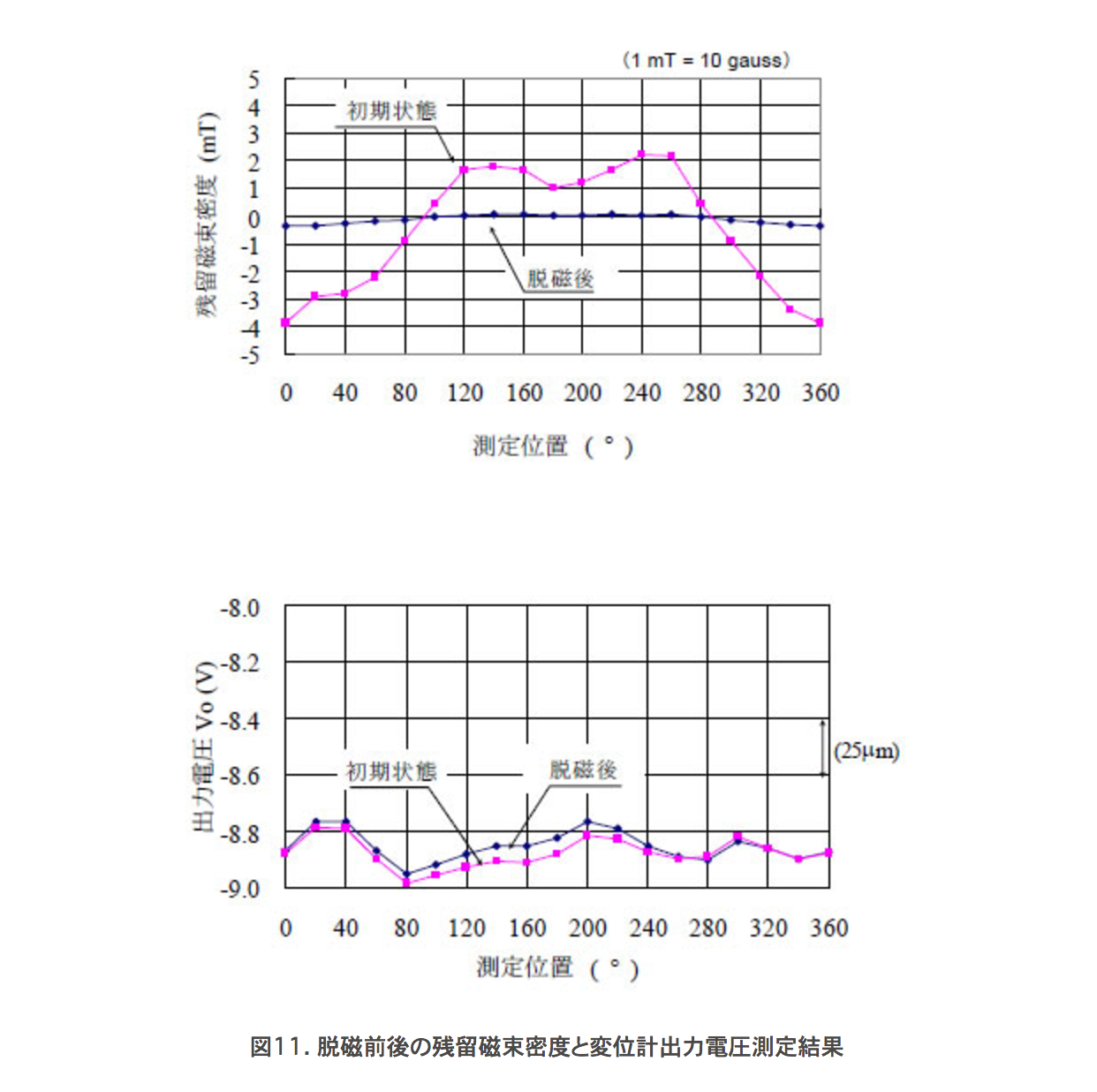
図11に、ある試験ロータの脱磁前後の磁束密度の変化と変位計の出力電圧の変化を示していますが、この結果(および他のロータ部分の実験結果)は残留磁気が変位計出力に有意な影響を与えていないことを示しています。
(注:磁束密度の単位1gauss=0.1mT〔ミリ・テスラ〕)
3)比透磁率と残留応力の影響
先にも述べたように、比透磁率や残留応力は連続的に容易に測定できるものではなく、実機ロータに対して測定することは現実的ではありません。
しかし、エレクトリカルランナウトの大きな要因として比透磁率と残留応力の影響が考えられるため、ここでは、試験ロータによる試験結果を基にその影響の概要を説明します。
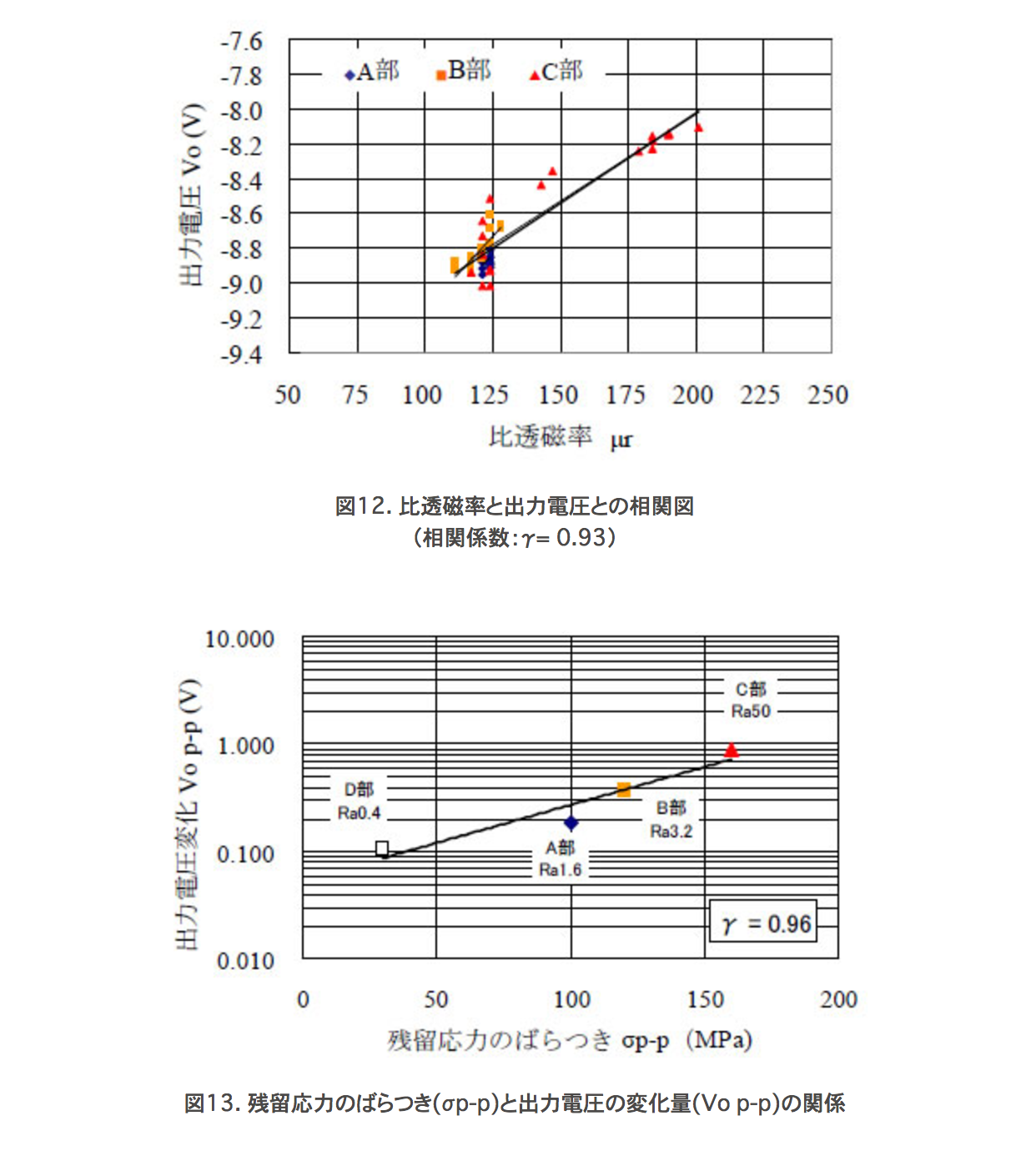
まず、図12は、試験ロータの各測定点における比透磁率と変位計の出力電圧の相関を示したものです。
ここで相関係数:γ=0.93と大きな相関を示しており、比透磁率のむらがエレクトリカルランナウトに影響していることが分かります。
次に、図13は、試験ロータの各測定点における残留応力のばらつきと変位計出力電圧の変化量の関係を示したものです。
ここでも相関係数:γ=0.96と大きな相関を示しており、残留応力のばらつきがエレクトリカルランナウトに影響していることが分かります。
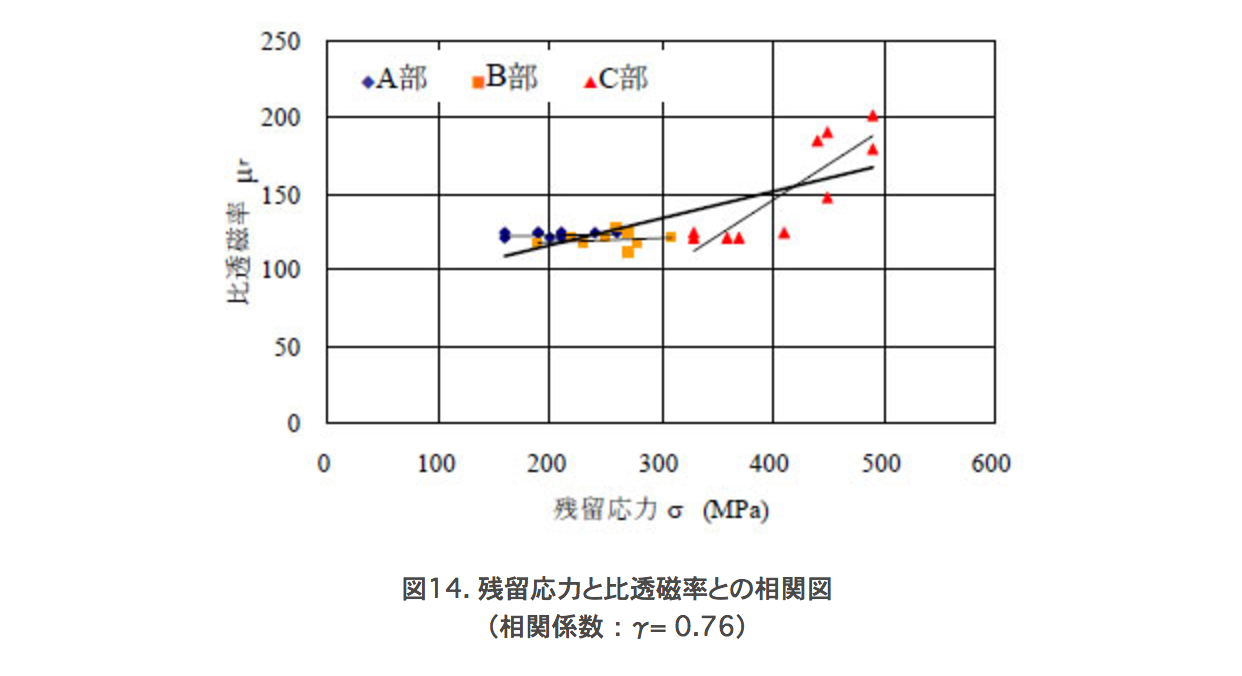
さらに、ここでエレクトリカルランナウトの主要因と考えられる比透磁率と残留応力は図14に示すように比較的大きな相関を示すことが分かります。
また、これらの試験より、ターゲットの表面粗さが小さいほど、比透磁率と残留応力のバラつきが小さくなるという結果を得ています。
これらの結果より、「表面粗さを小さく仕上げる」⇒「比透磁率と残留応力のバラつきが小さくなる」⇒「エレクトリカルランナウトを小さく抑える」という関係が言えそうです。
ただし、十分に表面仕上げを実施し、エレクトリカルランナウトを規定値以内に抑えたロータであっても、その後残留応力のばらつきを生じるような部分的な衝撃や圧力を与えた場合には、再びランナウトが生じることがあります。
4)エレクトリカルランナウトの各要因に対する許容値
API 670規格(4th Edition)の6.1.1.3項では、エレクトリカルランナウトとメカニカルランナウトの合成した値が最大許容振動振幅の25%または6μmのどちらか大きい方を超えてはならないと規定しています。
また、現実的にはランナウトを実測して上記許容値を超えるような場合には、脱磁やダイヤモンド・バニシング処理などにより結果を抑えるように規定しています。
ただし、脱磁は上記の「許容残留磁気」の項目でも述べたように、現実的にはその効果はあまり期待できないと考えられます。
一方、ダイヤモンドバニシングに関しては、機械的に表面状態を綺麗に仕上げるというだけでなく、ターゲット表面の比透磁率と残留応力の均一化の効果も期待できるため、これによりエレクトリカルランナウトを減少させることが考えられます。
5)渦電流式変位センサにおける磁束の浸透深さ
ターゲット表面における渦電流の電流密度を J0[A/m2]とし、ある深さ x[m]における渦電流の電流密度を J[A/m2]とすると、J=J0・e-x/δとなり、δを磁束の浸透深さと呼びます。
ここで、磁束の浸透深さとは渦電流の電流密度がターゲット表面の36.8%(1/e)に減衰する深さのことで、下記の式(6)で表されます。
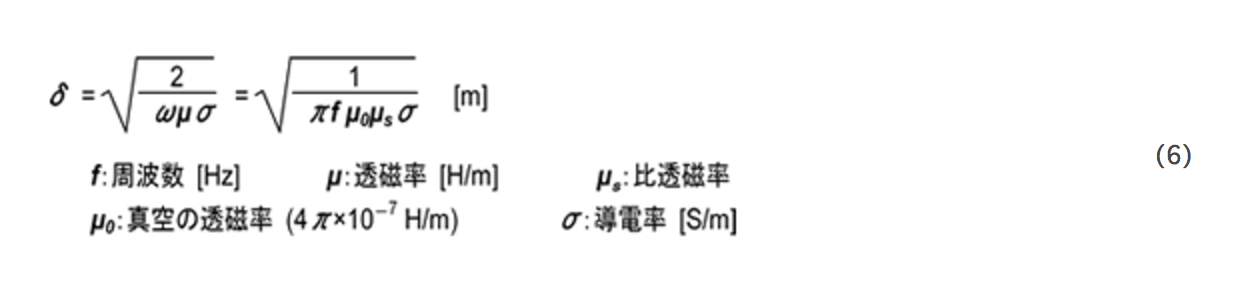
この式より、例えばキャリアの周波数 f が1MHzの渦電流式変位センサにおける磁束の浸透深さを計算すると、ターゲット材質がSCM440の場合約40μm、SUS304の場合約400μm、アルミの場合約80μm、クロムの場合約180μmとなります。なお計測に影響する深さは δ の5倍程度と考えられます。
ここで、ターゲットとなる鋼材のエレクトリカルランナウトを抑える目的でその表面にクロムメッキを施す場合を考えると、メッキ厚が薄ければ下地のランナウトの影響を充分に抑えられず、さらにメッキ厚が均一でなければその影響もランナウトとして出る可能性があり、それらを考慮すると1mm近い厚さのメッキが必要ということになり現実的に適用するには問題があります。
API 670規格(4th Edition)の6.1.1.2項においても、ターゲットエリアにはメタライズまたはメッキをしないことと規定しています。
※本コラムでは、ランナウトに関する試験データの一部のみ掲載しています。より詳しい試験データと考察に関しては、「新川技報2008」の技術論文「渦電流形変位センサの出力のターゲット表面状態の物性の影響(旭等)」を参照ください。
出典:『技術コラム 回転機械の状態監視や解析診断』新川電機株式会社
![]()