
![]()
2018/1/23 ものづくりニュース
分かりにくい用語とその意味(13)バランス調整/不釣合い修正
前回は、回転数の変化に伴い、ヘビースポットに対するハイスポットの位相が変化するとともに振動振幅値も変化して、ポーラ線図上の振動ベクトルの軌跡が円弧を描いて変化することと、危険速度における振動ベクトルより90度進み方向にヘビースポットがあることを説明しました。
今回は、振動ベクトルを利用してロータのバランス調整(不釣合い修正)を行う方法について説明します。
一速度一面効果ベクトルバランス法
ここでは、前回および前々回と同じ前提条件の説明モデルに対して、ある一定の回転数におけるベクトルからアンバランス(不釣合い)を打ち消すための修正おもりの取付位置と質量の求め方について説明します。
まず、前々回からの復習の意味も含め、ロータの位相基準信号と軸振動波形の測定イメージ、およびそれぞれの信号波形とそれに対応するポーラ線図上の振動ベクトルのイメージを一つにまとめて図21に示します。
図21の(b)(c)は前々回の図15と同じものですが、この位相基準信号と振動波形の入力として、ロータモデルに対するそれぞれの信号の測定センサ配置のイメージを追記しています。
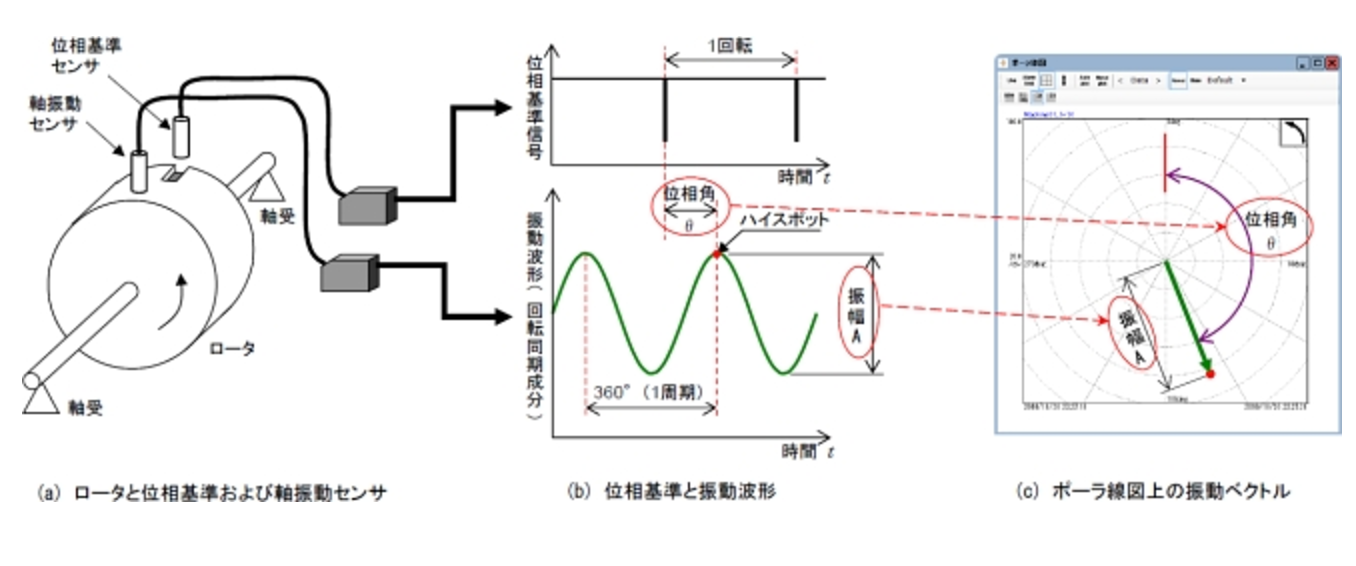
▲図21.ロータにおける位相基準および軸振動波形測定イメージと振動ベクトルの関係
それでは、図21の測定から振動ベクトルプロットまでの流れを踏まえて、図22に示すロータのイメージとポーラ線図を使って一速度一面効果ベクトルバランス法について説明します。
なお、一速度一面効果ベクトルバランス法は、下記の条件で実施することが必要です。
(a) 図22の①〜⑤の振動ベクトル計測時の回転数はいずれも同じ回転数とする。
(b) 試しおもりと修正おもりの軸中心からの距離は同じとする。
また、図22の②〜⑤のポーラ線図の100μmの円周上に試しおもりと修正おもりの位置をプロットしていますが、これは取付角度を視覚的に分かりやすくためのものであり、100μmの円周上にプロットしていることには特に意味はありません。
この例で示したポーラ線図の最大円が100μmのため、その円周上にプロットしているだけです。
では、図22の①〜⑤に沿って説明します。
① バランス前の初期状態における振動ベクトルを示しています。
この例では、(100μm、30°)であり、分かりやすくするために原点から(100μm、30°)に向けて矢印を引いています。
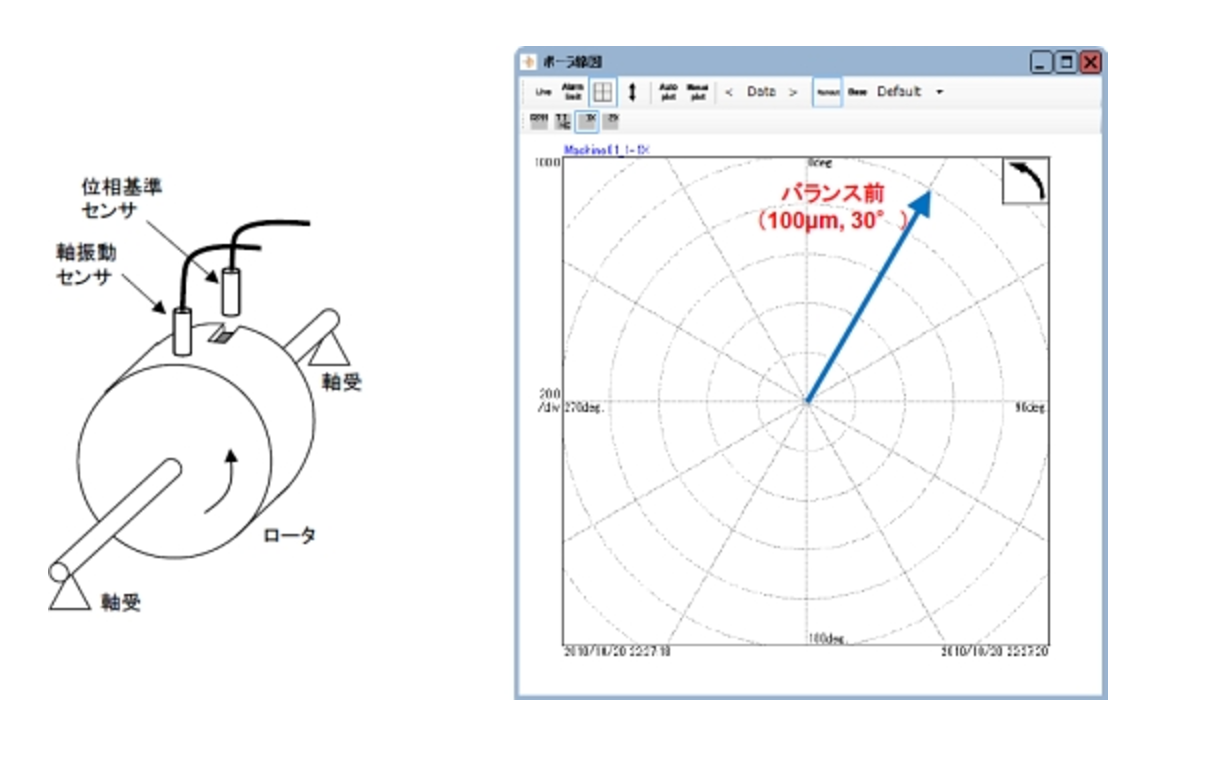
①バランス前の初期状態における振動ベクトル(100μm、30°)
▲図22.一速度一面効果ベクトルバランスの例
②このロータの位相基準から遅れ方向105°の位置に100gの試しおもりを付けて回転させた時の振動ベクトルを示しています。
この時の振動ベクトルは(60μm、60°)となり、これも原点から矢印を引いて示しています。
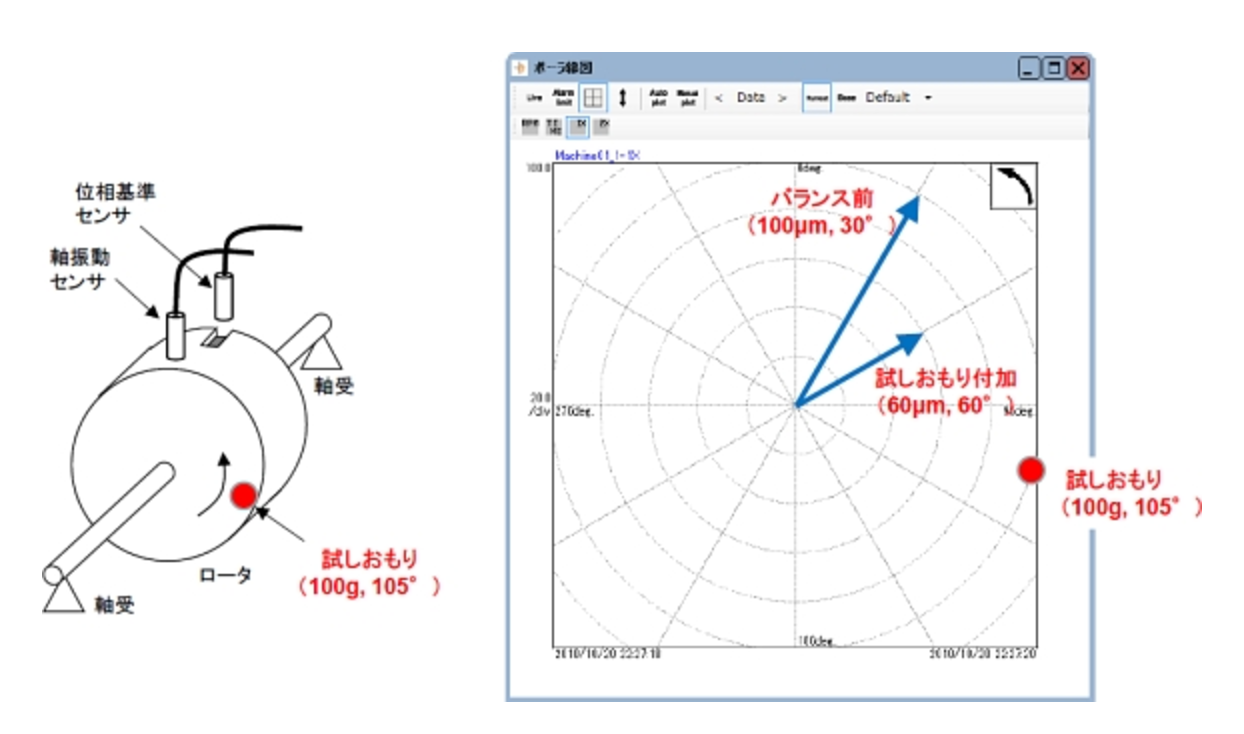
②試しおもり付加(100g、105°)時の振動ベクトル(60μm、60°)
▲図22.一速度一面効果ベクトルバランスの例
③初期ベクトルから試しおもり付加時のベクトルに向かって矢印を引いていますが、これは(100g、105°)の試しおもりを付加した影響(効果)によるベクトルの変化を示すもので、試しおもりによる効果ベクトルと呼びます。
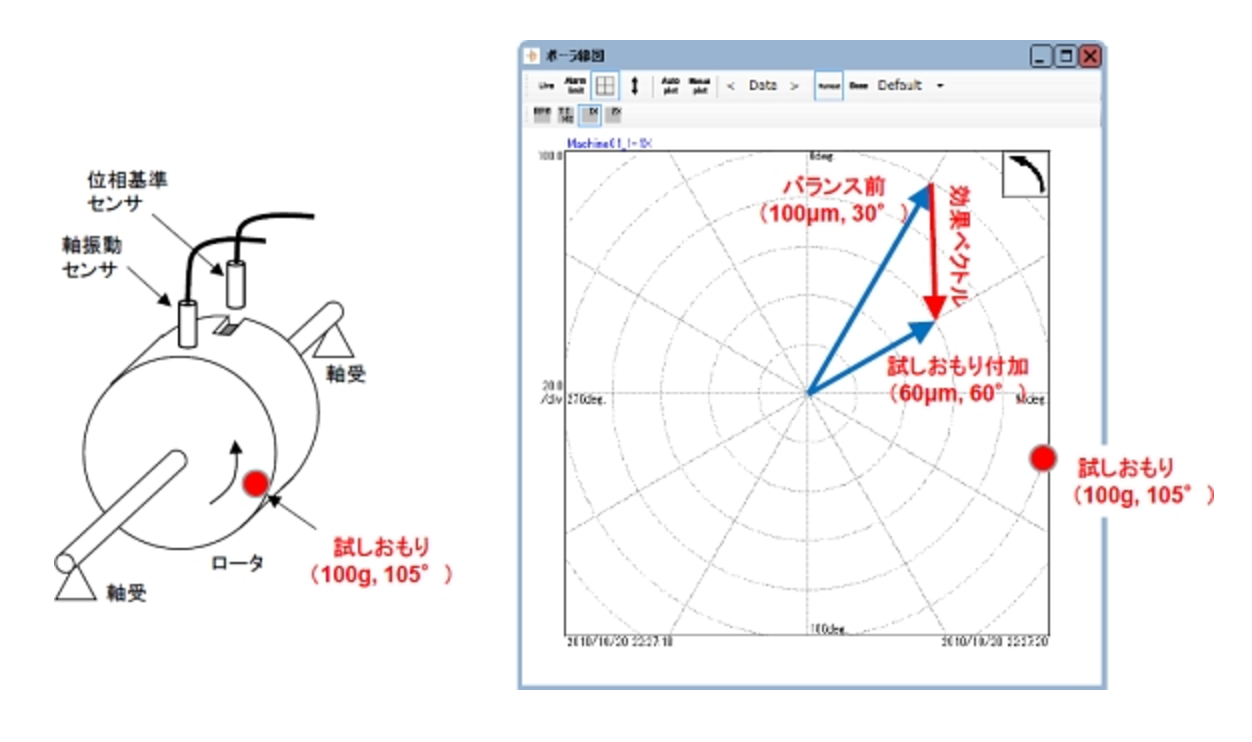
③試しおもり付加による効果ベクトル(バランス前→試しおもり付加時)
▲図22.一速度一面効果ベクトルバランスの例
④試しおもりによる効果ベクトルを平行移動して、ベクトルの始点をポーラ線図の原点に合わせます。この時、ポーラ線図上で効果ベクトルは(57μm、178°)であることが分かります。
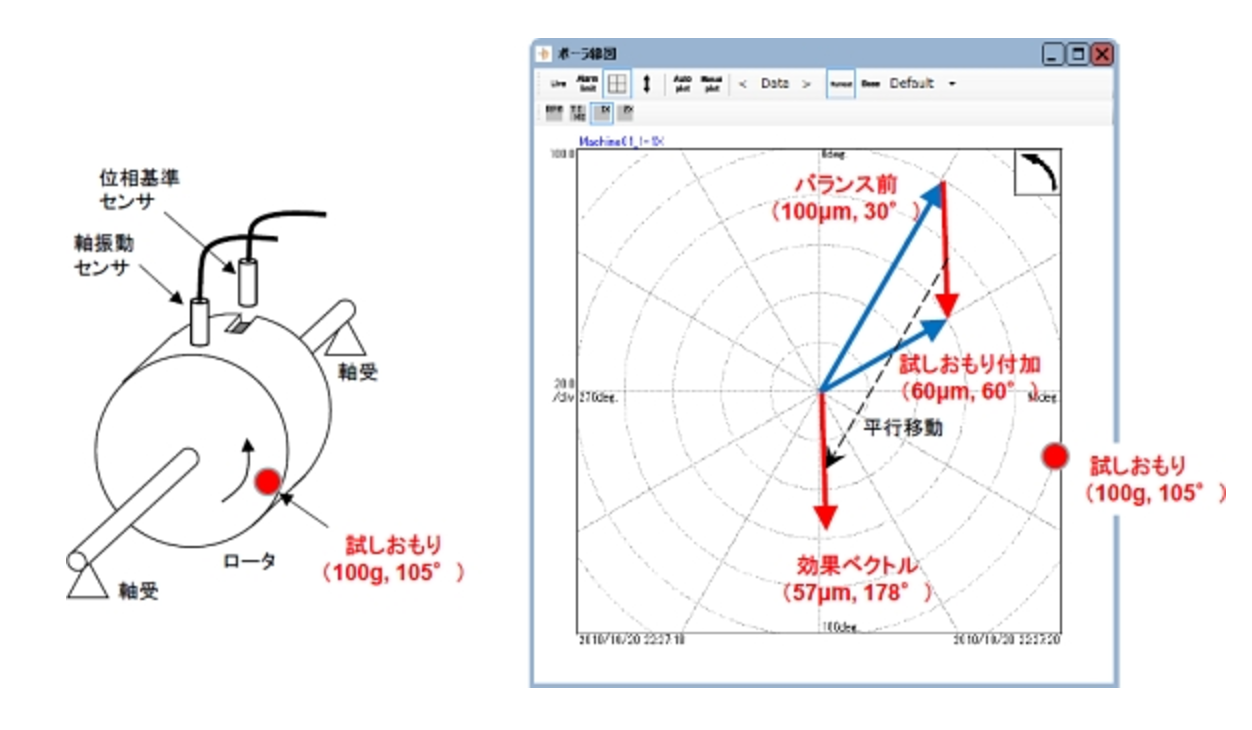
④効果ベクトルを原点に平行移動(57μm、178°)
▲図22.一速度一面効果ベクトルバランスの例
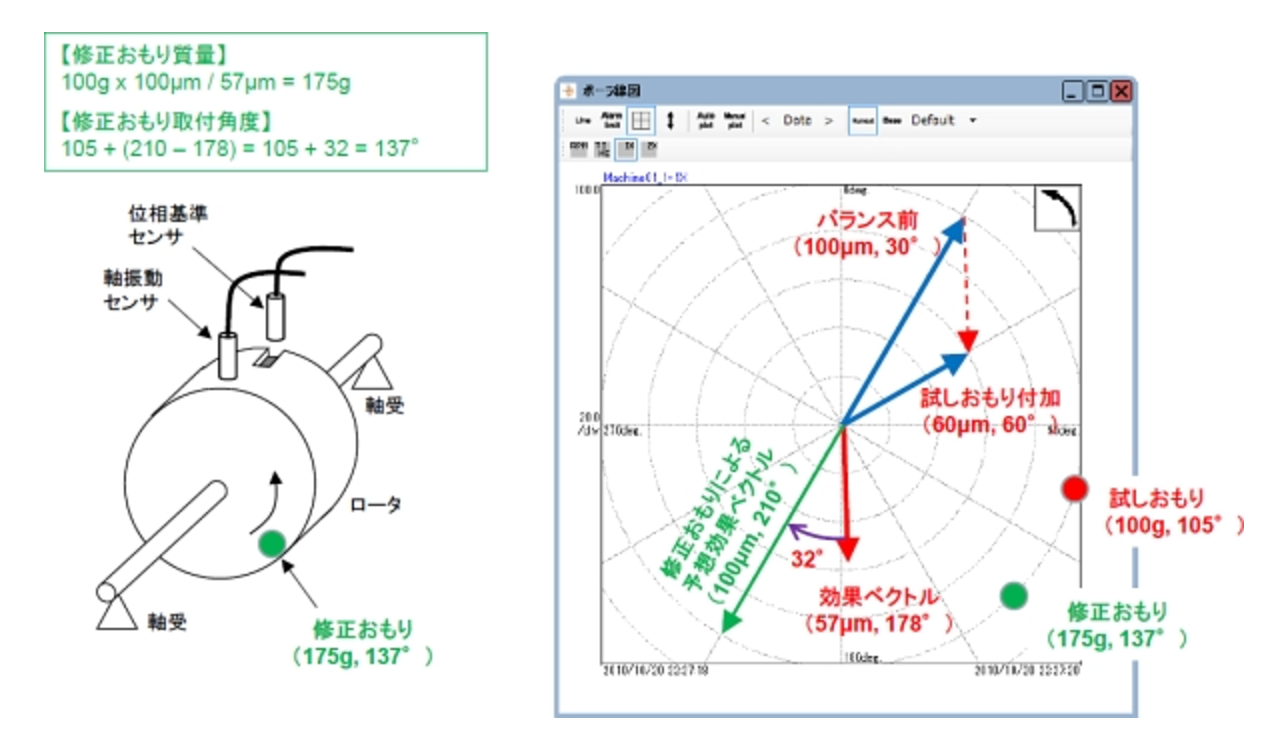
⑤試しおもりの代わりに修正おもりを取付けることにより、アンバランスを解消するためには、修正おもりによる予想効果ベクトルがバランス前の初期ベクトルを打ち消すように、大きさが同じで角度が正反対となるようにすればよいことが分かります。
この例では、初期ベクトル(100μm、30°)を打ち消すための修正おもりによる予想効果ベクトルは(100μm、210°)とする必要があります。
そこで、試しおもりによる効果ベクトルと修正おもりによる効果ベクトルを比較してみると、大きさが100μm/57μm=1.75倍で、角度が210–178=32°となっています。
試しおもりによる効果ベクトルは、試しおもり(100g、105°)によって得られたものですので、修正おもりは、質量を100g×1.75=175gとし、取付角度を105+32=137°とすればよいということになります。
⑤効果ベクトルと修正おもりによる予想効果ベクトルの比較と修正おもりの算出
▲図22.一速度一面効果ベクトルバランスの例
上記の流れで得られた結果にしたがって、(100g、105°)の試しおもりを外して、代わりに(175g、137°)の修正おもりを取付ける事で、この回転数におけるアンバランス振動は最小限に抑えられることになります。
図23は滑り軸受で支持されたロータキットで、不釣合い、ミスアライメント、ロータ部品の飛散、およびオイルホワール現象による異常振動を発生させることができます。
このロータ部分には20度ピッチで試しおもり、修正おもりを取付けられるようになっていて、上記の方法でバランス調整の演習を行うことができるようになっています。
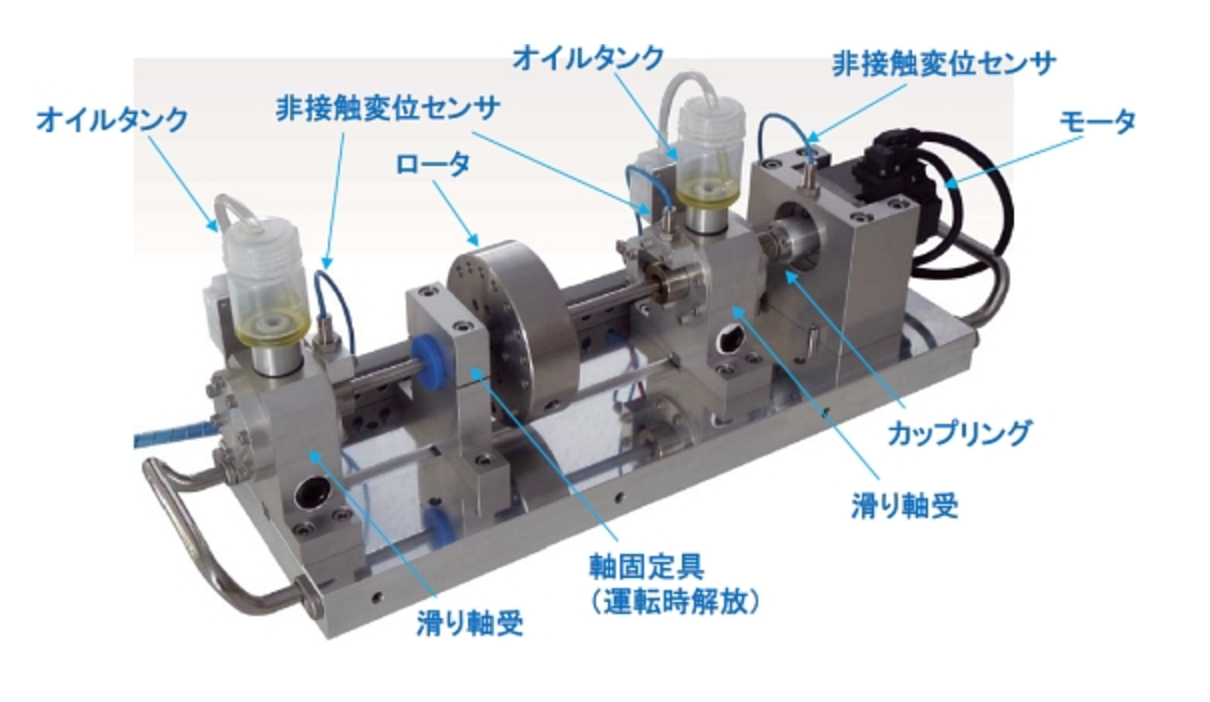
▲図23.滑り軸受ロータキットModel9E12-001
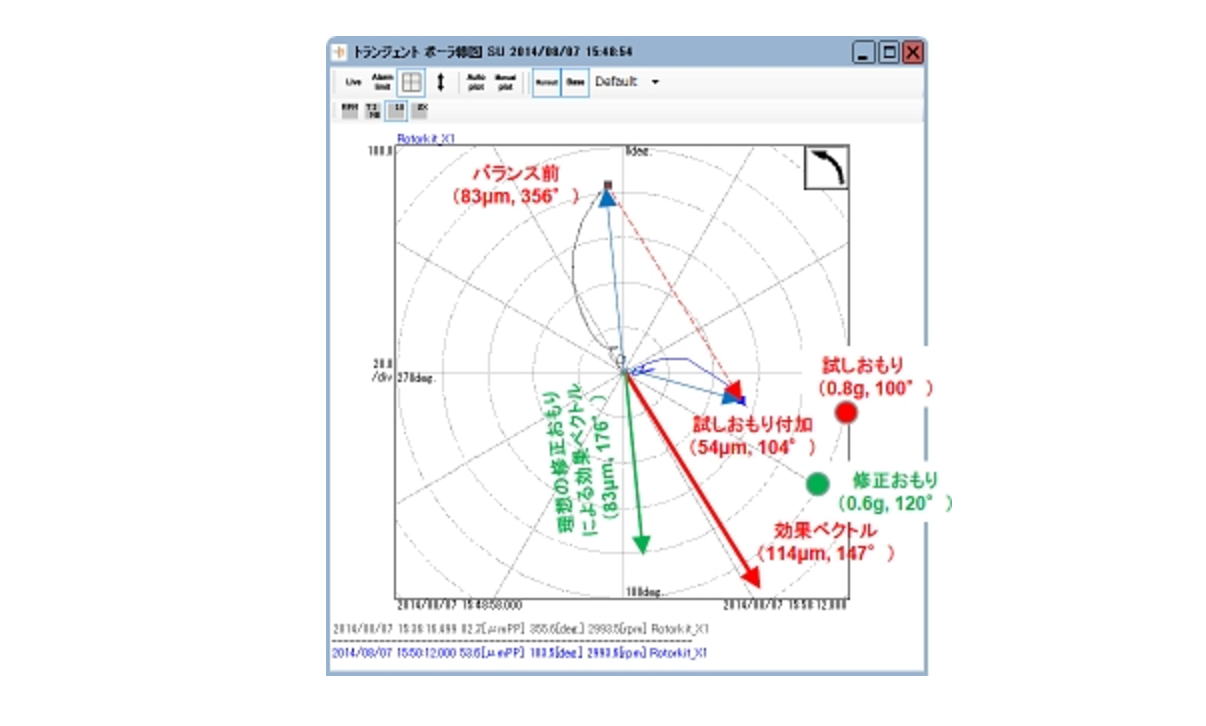
図24に、このロータキットとポータブル振動解析システムKenjinを使って、約3000rpmにおける、バランス調整前の初期ベクトルと試おもりを付加したときのベクトルを計測し、そこから得られた効果ベクトルを基に計算した修正おもりによるバランス調整例を示しています。
(a)試しおもりによる効果ベクトル測定
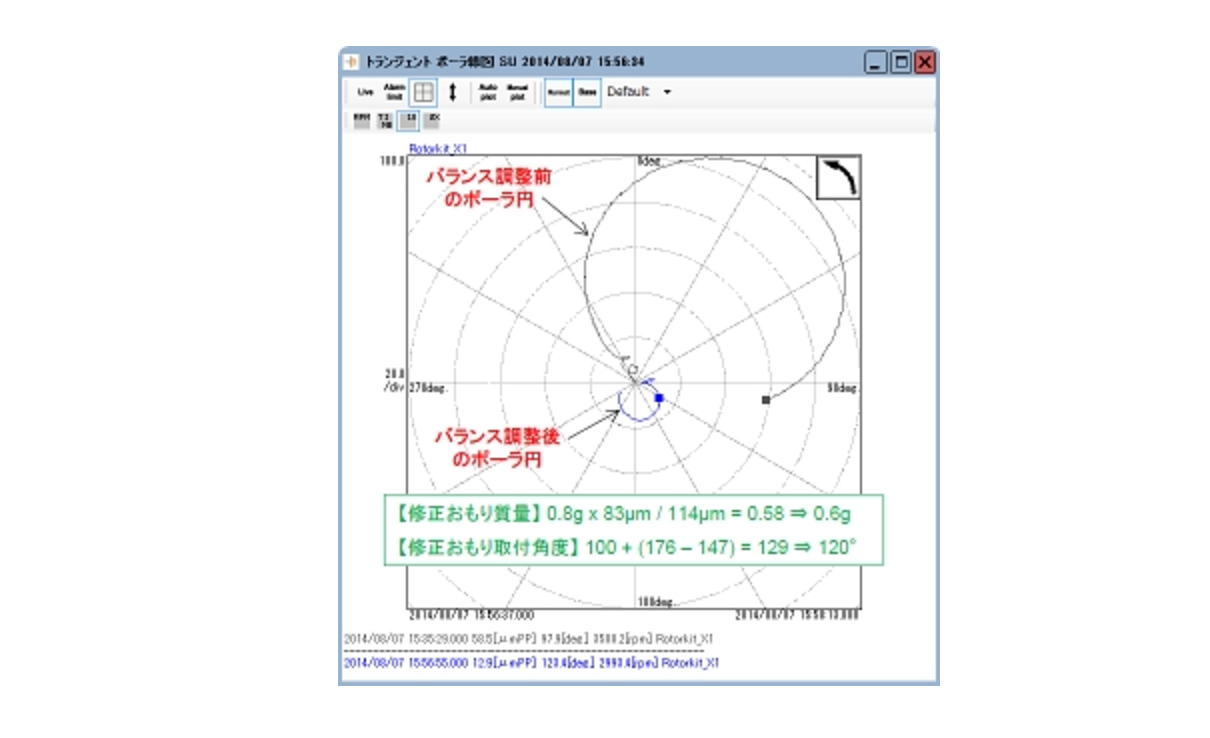
(b)バランス調整前後のポーラ円
▲図24.ロータキットによるバランス調整実例
修正おもりの計算値は(0.58g、129°)ですが、付属のおもりは0.2gピッチで、取付け角度20度ピッチのため、実際の修正おもりは(0.6g、120°)として約3000rpmで運転したところ、バランス調整前83μmから、バランス調整後13μmに抑えることができています。
図24の(b)はバランス調整前後のポーラ円を示していますが、全回転数域でうまくバランス調整ができていることがわかります。
実際の回転機械のバランス調整は、上記のような一面調整だけではなく、複数面の調整を要することが一般的ですが、基本的な考え方は上記の方法で理解していただけるのではないかと思います。
出典:『技術コラム 回転機械の状態監視や解析診断』新川電機株式会社
![]()