
![]()
2017/2/28 ものづくりニュース
【API 670規格-Machinery Protection Systems-概要】vol.2 モニタシステム その1
前回はAPI 670規格の適用範囲とシステム構成要素、および非接触変位センサについて述べましたが、今回はモニタシステム全体および軸振動モニタリングと軸位置モニタリングについて概要を説明します。
4.モニタシステム
API 670規格では図1に示すように機械保護システム(Machinery Protection System)の中の、信号処理(Signal processing)、警報ロジック(Alarm/Shutdown Integrity logic processing)、電源(Power supply)、表示(Display indication)、入出力(Input/Output)、保護リレー(Protective relay)の各機能ブロックから構成された部分を「モニタシステム(Monitor system)と定義しています。
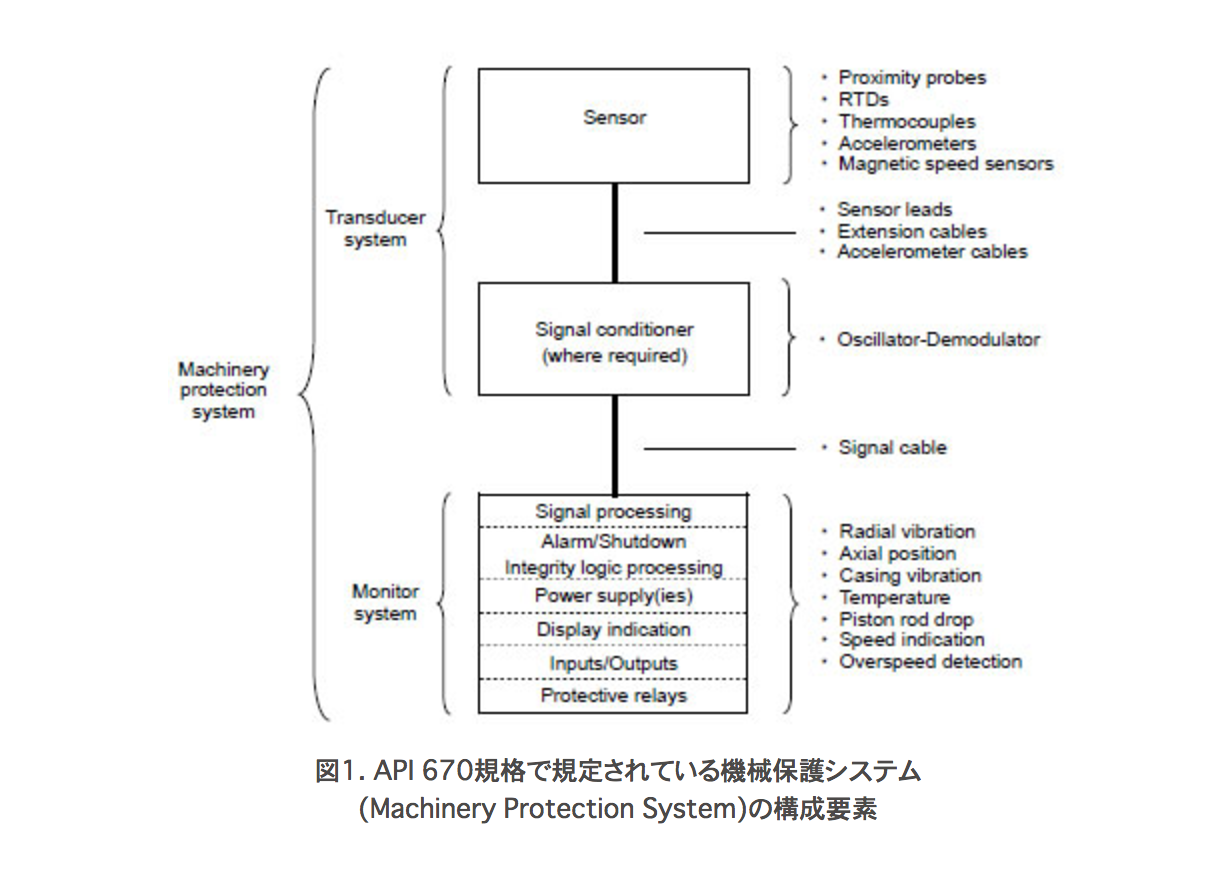
※図1は、API Standard 670 Fourth Edition, December 2000の“Figure 1-Machinery Protection System”より転載しています。
モニタシステムは通常、上記の機能ブロックの全てをまとめてモニタラック(収納ケース)に納めた形態をとり、図4に示すように、モニタラックには振動チャンネル、スラストチャンネルなど必要な機種のモニタモジュールを必要なチャンネル数実装します。
図4の左端に示す“Power supply(ies)”は、標準では電源モジュールを1モジュール実装するが、要求があれば電源冗長化(オプション)のために複数の電源モジュールを実装することを示しています。
また図4には、右端に“Electronic overspeed detection monitor”が、振動チャンネルなどのモニタとは分けて書かれていますが、これはオーバースピード検知システムが他の制御、保護システムから分離されたオーバースピード検知専用の独立したシステムでなければならないことを示しています。
さらに、オーバースピード検知システムは標準で電源の冗長化を要求しているため“Redundant power supplies”と記されています。
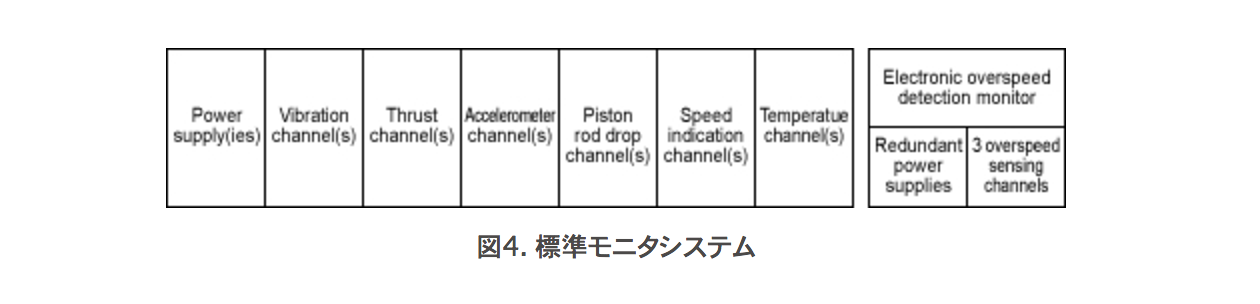
※図4は、API Standard 670 Fourth Edition, December 2000の”Figure 2-Standard Monitor System Nomenclature”より転載しています。
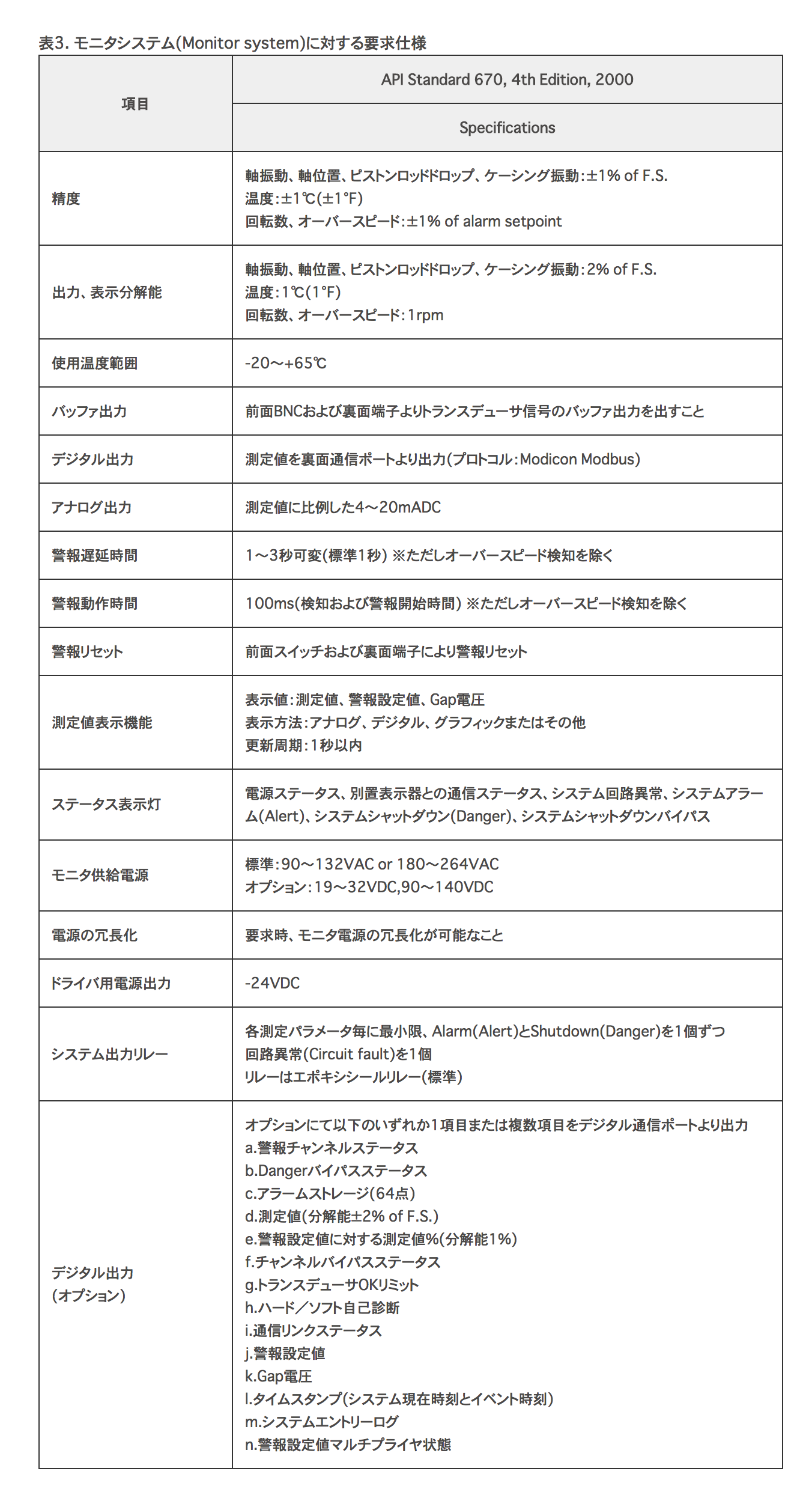
表3にモニタシステム全般に対する主な要求事項を示します。
なお、図1で示されたモニタシステムの中の表示機能ブロックに関しては、別置とすることもAPI 670規格の中でオプションとして示されています。
ただし、表3に示す「ステータス表示灯」はモニタ本体に実装することが必要条件となっています。
このようなモニタ本体に表示機能を実装していないモニタをAPI 670規格ではブラインドモニタシステム(Blind monitor system)と呼びます。
次に、個別のモニタチャンネルに対する要求事項に関して述べてゆきます。まず、主要なモニタリング項目である軸振動と軸位置モニタリングに関して説明します。
4-1.軸振動モニタリング(Radial Shaft Vibration Monitoring)
軸振動モニタリングは、各ベアリング毎に、ラジアル方向に90度の角度を持って設置された2個の非接触変位センサの組合せ(通常それぞれのチャンネルをXch,Ychと称す)により測定、監視されます。
モニタのフルスケールレンジは標準で0~125μmp-p、オプションで0~250μmp-pと規定されています。
また、XchとYchの組合せによる警報ロジックに関して以下のように規定しています。
- ひとつのチャンネルがShutdown(Danger)警報設定値を超えた時にShutdown(Danger)警報リレーを動作させるシングルロジックと、両チャンネルともShutdown(Danger)設定値を超えた時にShutdown(Danger)警報リレーを動作させるデュアルボーティングロジックのいずれかをフィールドで変更できること。デュアルボーティングロジックを標準とする。
- デュアルボーティングロジックにおいて、一方がShutdown(Danger)設定値を超えていて、他方がNot-OKの場合にはNot-OK警報リレーのみ動作させ、Shutdown(Danger)警報リレーは動作させないこと。
4-2.軸位置モニタリング(Axial Position Monitoring)
軸位置モニタリングは、スラストベアリング側のロータエンドに対向して軸方向に設置された2個の非接触変位センサにより測定、監視されます。
モニタのフルスケールレンジは-1.0~+1.0mmです。
また、軸位置モニタリングの2つのチャンネルの警報ロジックに関しても下記のように規定しています。
- ひとつのチャンネルが警報設定値を超えた時にShutdown(Danger)警報リレーを動作させるシングルロジックと、両チャンネルとも設定値を超えた時にShutdown(Danger)警報リレーを動作させるデュアルボーティングロジックのいずれかをフィールドで変更できること。デュアルボーティングロジックを標準とする。
- デュアルボーティングロジックにおいて、以下の条件のいずれかにおいてShutdown(Danger)警報リレーを動作させること。
- 一方のチャンネルのみNot-OKの場合には危険警報を出さないこと。
a.両方のチャンネルがNot-OKの場合
b.どちらか一方のチャンネルがNot-OKで、もう一方のチャンネルがShutdown(Danger)警報設定値を越えた場合
c.両方のチャンネルがShutdown(Danger)警報設定値を越えた場合
ここで述べた軸振動モニタリングと軸位置モニタリングの最も典型的なアプリケーション例として、タービンにおけるシステムアレンジの例を図5に示します。
図5は、API 670規格の”APPENDIX H-TYPICAL SYSTEM ARRANGEMENT PLANS”にFigure H-1として示されているシステムアレンジ図を基にして作成しています。
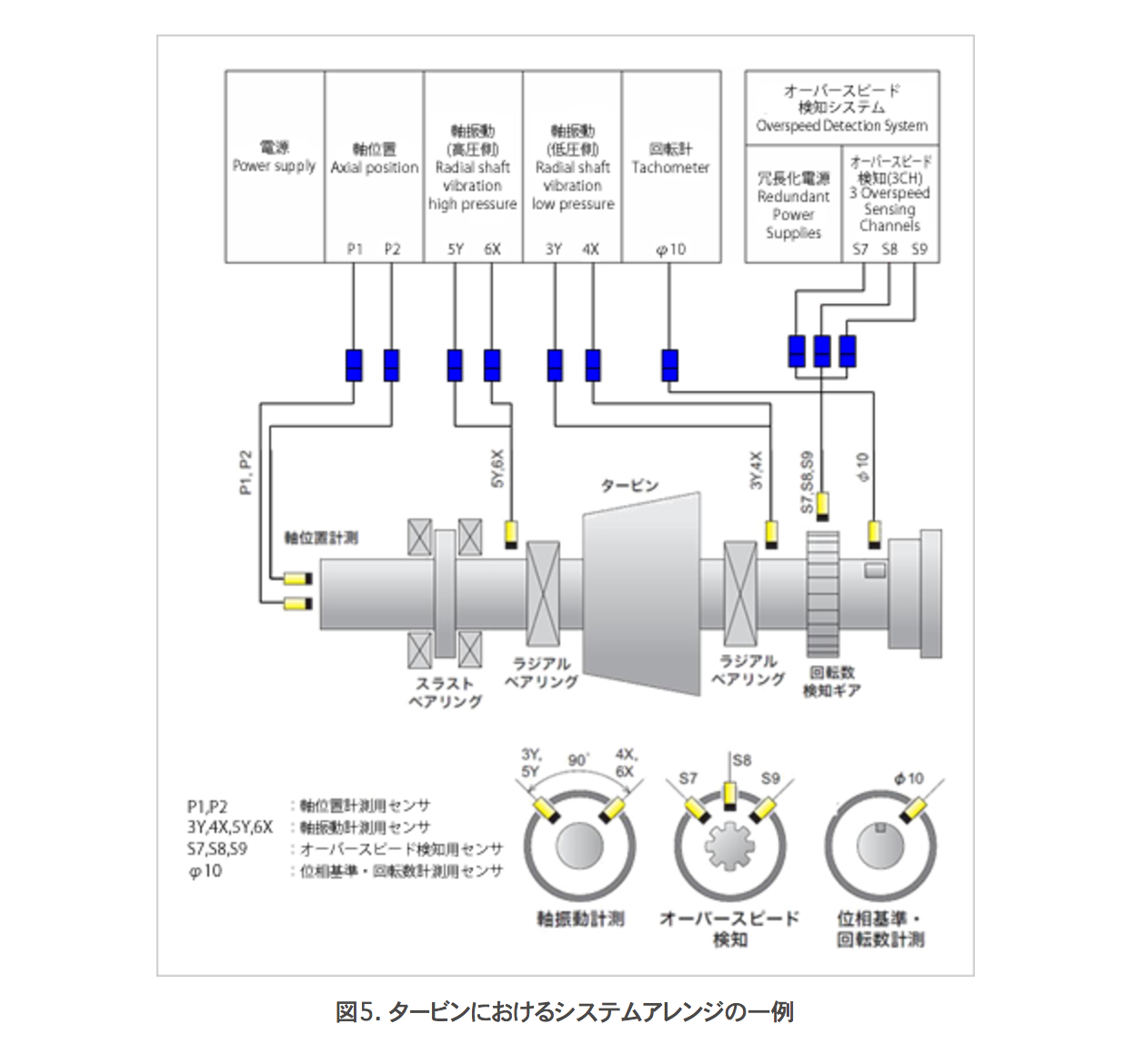
※図5は、API Standard 670 Fourth Edition, December 2000の”Figure H-1-Typical System Arrangement for a Turbine With Hydrodynamic Bearings”を基にして、各センサの配置はそのままとして、図のイメージと方向を変更して作成しています。
次回は、ピストンロッドドロップモニタリングとオーバースピード検知についてAPI 670規格の要求事項について説明する予定です。
出典:『技術コラム 回転機械の状態監視や解析診断』新川電機株式会社
![]()