![]()
2017/7/11 ものづくりニュース
【状態監視モニタ】vol.4 偏心モニタ
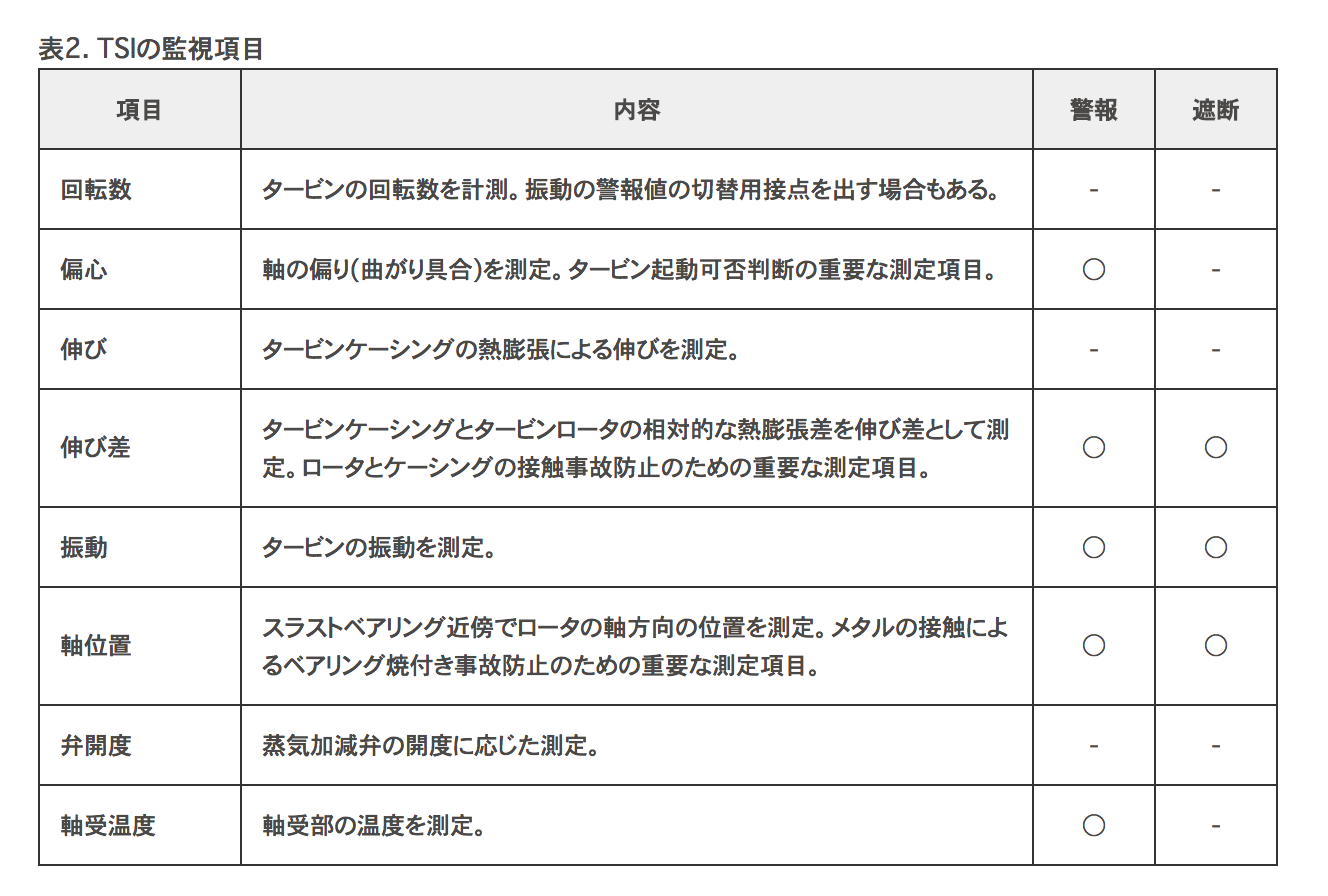
2010年2月号でも提示しましたが、TSI(タービン監視計器)の監視項目には何があるのか概要を表2に示します。
今回はTSI特有の監視項目の中から「偏心計測」に関してもう少し詳しく説明します。
偏心計測とは
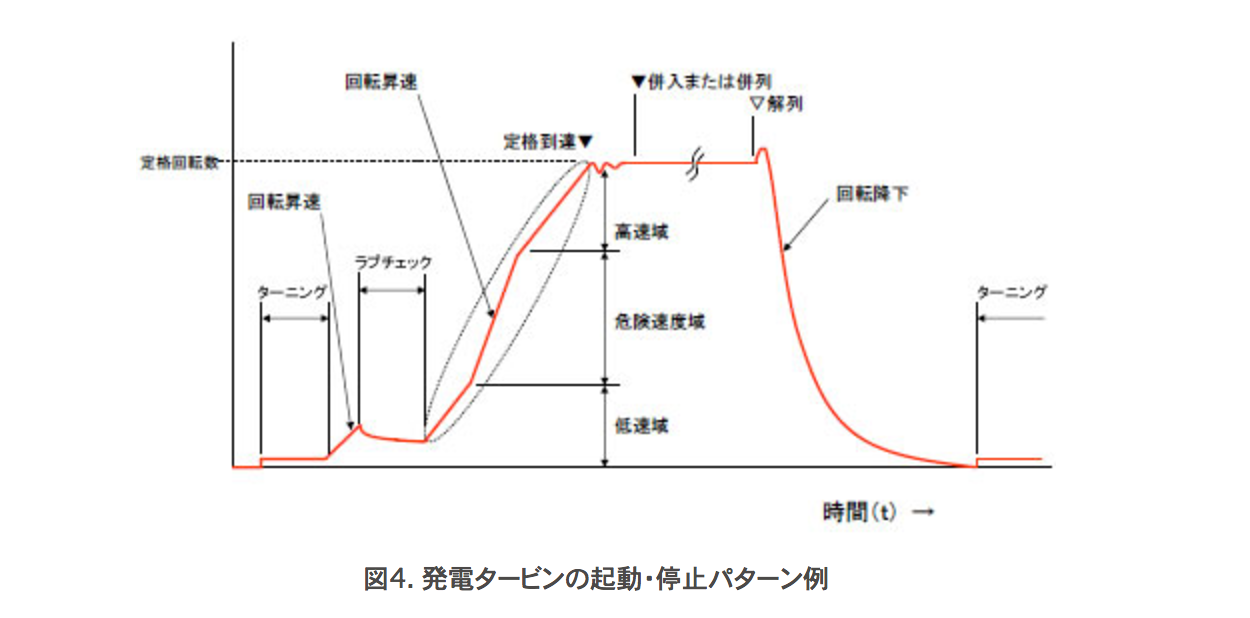
図4は発電タービンの一般的な起動・停止パターンを示していますが、この起動時の低速回転運転「ターニング」の状態において軸の偏りが偏心であり、この偏りを測るのが偏心計測ということになります。
タービンロータは停止中に自重や温度の不均衡などにより簡単に曲がります。
タービン起動時の回転昇速前に数rpmから10rpm程度の低速回転運転を行いますが、これをターニングと呼びます。
このターニング時におけるタービンロータの曲がりを偏心量として監視し、許容値以下になってから回転昇速を開始します。
なお、図4では定格運転終了(解列)から回転降下・停止後にもターニング状態が示されていますが、これはタービンロータが熱いうちに回転停止してしまうと自重により曲がりやすくなってしまうため、タービンロータが十分に冷えるまで低速回転による運転を続けている状態を示しています。
ここで余談になりますが、タービンのターニングは、ターニングギアを介してターニング用のモータにより駆動されます。
このターニングギアはタービン運転時には外れた状態であり、タービンが十分に回転降下してほぼ停止した状態でターニングギアを勘合します。
この時、回転がほぼ停止した状態を検知するモニタをゼロスピードモニタと呼びます。
まだタービンがある程度の回転数で回転している状態でターニングギアを勘合してしまうと、ターニングギアやロータを損傷してしまう可能性があり、このゼロスピードモニタを含むゼロスピード検知システムは重要な制御システムの一つということになります。
偏心計測センサ
偏心計測には軸振動計測用センサとして使用される2mmレンジの渦電流式変位センサ(FK-202Fなど)や、もう少しレンジの広い4.5mmレンジの渦電流式変位センサ(FK-452Fなど)が適用されます。
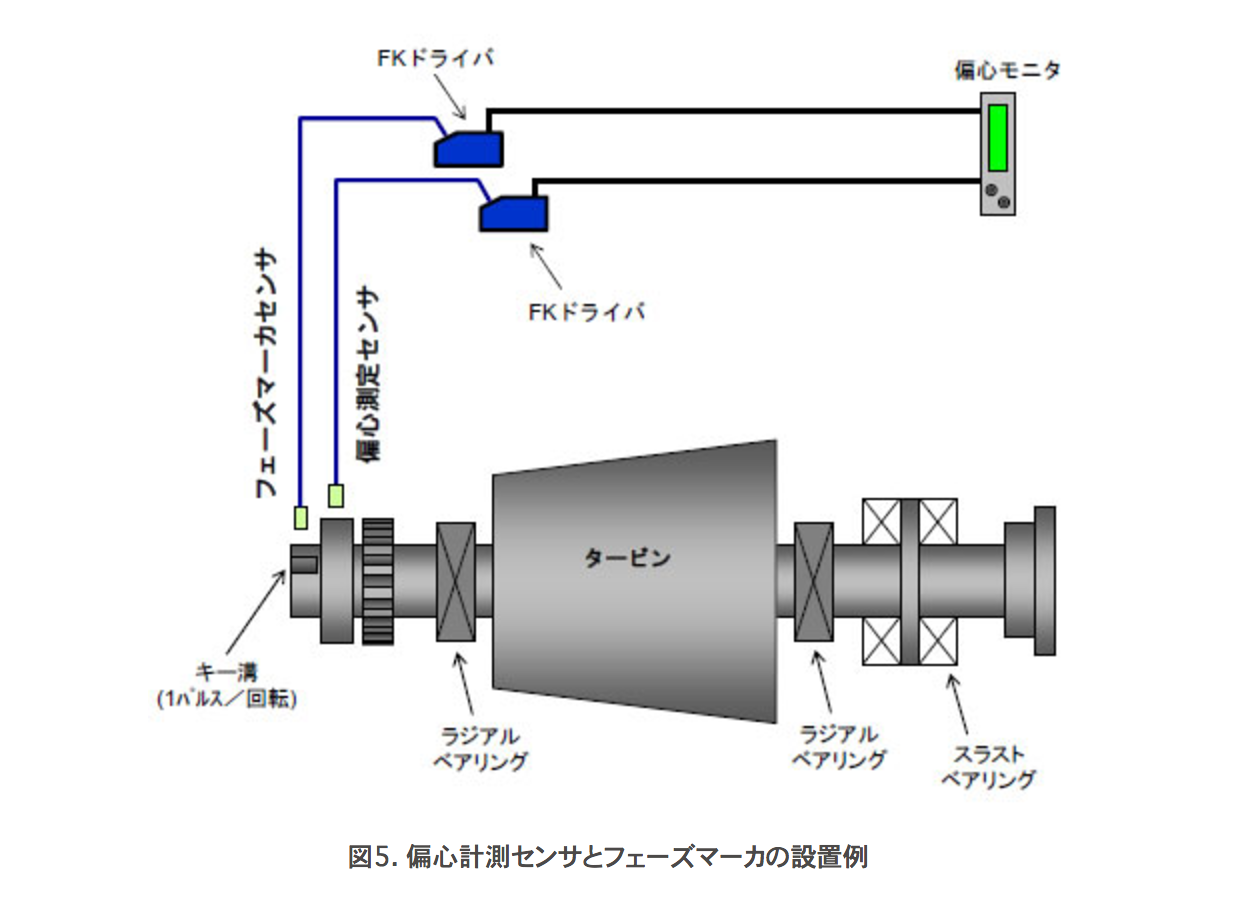
この偏心計測センサは図5に示すように、軸の曲がりが現れやすいロータ末端のロータ円周面や、ロータ末端に設けられたカラーの円周面をターゲットとして測定できるように設置されます。
偏心計測には上記の偏心計測センサだけでなく、図5にあるように1回転1パルスのフェーズマーカ信号も必要となります。
これは位相基準を得るためではなく、ロータの1回転が偏心波形のどこからどこまでかという1回転分の長さを知るためのものであり、例えば1回転60パルスなどの回転数検知用のパルスでもかまいません。
ただし、低速回転数でのパルス検知が必要なため、いずれの場合も渦電流式変位センサ(FK-202Fなど)を使用する必要があります(理由は2011年2月号と2011年3月号を参照ください)。
偏心モニタにおける偏心量の演算
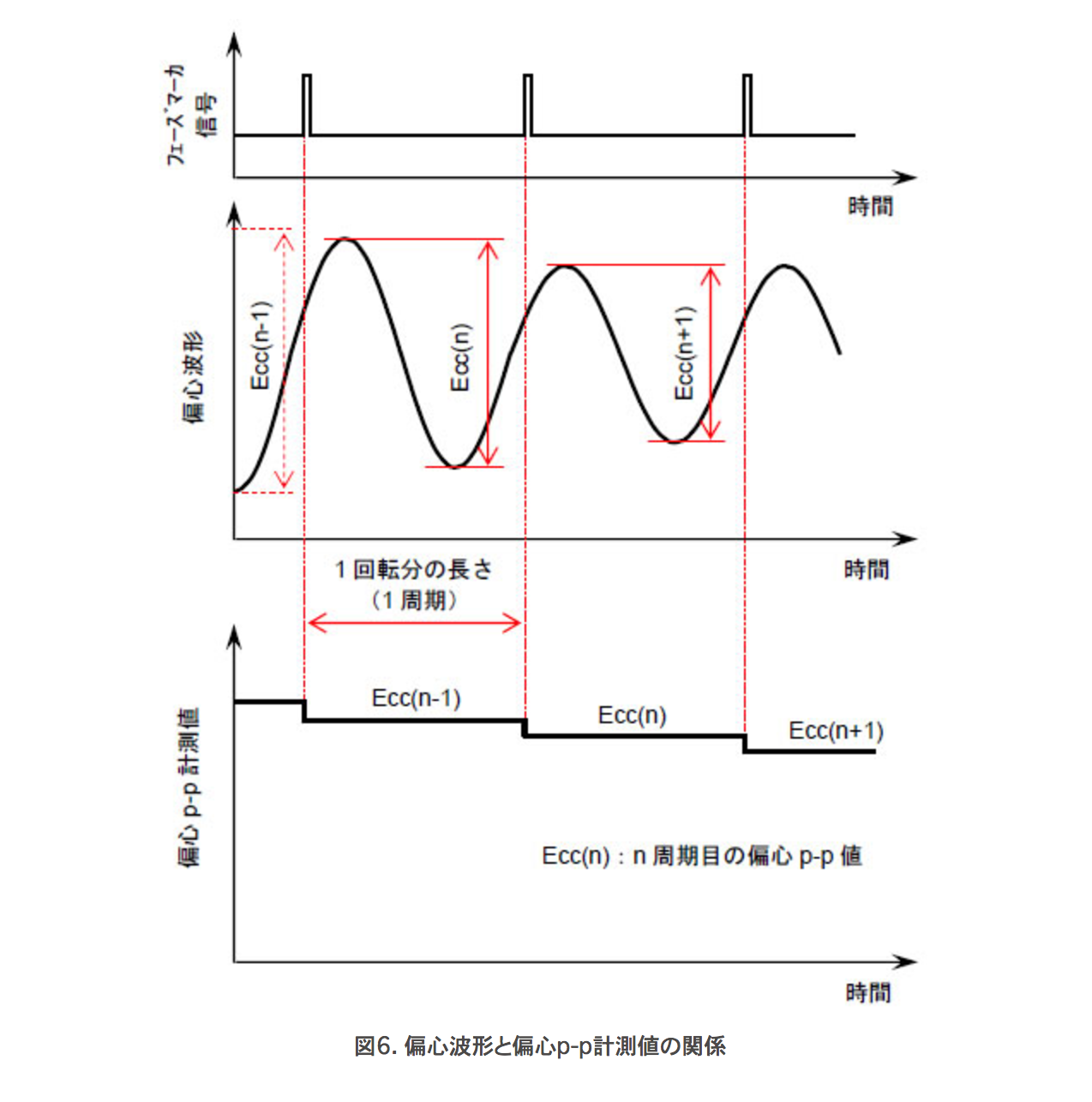
偏心モニタには上述のように、タービンロータ末端で偏心波形を検出する偏心計測センサと、偏心波形の1回転分の長さを知るためのフェーズマーカ信号(または回転数検知用パルス信号)が入力されます。
それぞれの信号は図6のように示されますが、偏心モニタでは1回転分の長さ、つまり偏心波形の1周期毎の最大値(ピーク)と最小値(ボトム)を検知し、その差を偏心量(偏心p-p値)として演算、出力しています。
さて、ここで疑問が生じませんか?
軸振動モニタでも振動波形の最大値と最小値の差である振幅値(p-p値)を演算しているのに、軸振動計測にはフェーズマーカ信号や回転数検知用パルス信号を必要としていません。
そもそも振動と偏心の違いは何?
機械振動を『機械系の運動または、変位を表す量の大きさが、ある平均値または基準値よりも大きい状態と小さい状態とを交互に繰り返す時間的変位』と定義するならば、ここで議論しているタービンの偏心も振動の一つであると言えます。
しかし、タービンの軸振動と偏心は明らかに別物として取り扱われます。
ここには上記の定義では規定されていない周波数(または周期)の違いがあります。
これは信号処理の都合上であったり、人間の感覚の問題でもあるかもしれませんが、振動とは動的(ダイナミック)な状態やその量であり、偏心とは静的(スタティック)な量であると言えるかも知れません。
そして回転機械の状態監視においては便宜上、数Hzから10kHz程度までを振動として取り扱っています。
したがって、周期が数十秒(周波数は0.1Hz以下)となるようなターニング時の周期的に繰り返される時間的変位は「振動」とは区別して「偏心」として取り扱っています。
ターニング時における時間的変位は振動として扱うにはあまりにも周期が長く、振動モニタにおける演算方法では検知不可能、または(長周期振動を演算できるように定数を変更したとしても)演算結果を得るまでに非常に長い時間を必要としてしまうことになります。
しかし、偏心モニタのようにフェーズマーカ信号や回転数検知用パルス信号を取り込んで、1回転分の長さを検知することができれば、図6でイメージできるように、1回転する毎に偏心量を検知することができるのです。
例えば、ターニング回転数が3rpm(周期20秒)だったとすれば、ある偏心のピークまたはボトムから長くてもわずか20秒後には偏心量を演算して出力を更新することができます。
20秒を「わずか」とは、と思われるかもしれませんが、元々周期が長いのでこれが最短ということになります(勿論、ターニング回転数がもっと遅ければ、周期は更に長くなり、偏心量更新までの時間も長くなります)。
偏心計測はかなり特殊な計測項目であり、上記の解説では分かりにくい点もあったかと思いますが、大型のタービンでは起動に欠かせない重要な計測項目であるということで理解していただければと思います。
さて、次回も大型タービン特有の計測項目である伸び差に関して説明する予定です。
出典:『技術コラム 回転機械の状態監視や解析診断』新川電機株式会社
![]()