
![]()
2017/6/20 ものづくりニュース
【状態監視モニタ】vol.1 振動モニタの働き
これまで、振動センサおよび関連する技術に関して説明してきましたが、今回から数回に渡り状態監視モニタに関して説明します。
まず今回は大型回転機械の状態監視モニタの中で最も多く利用される軸振動モニタの働きに関して説明します。
状態監視モニタに関しては、2010年2月号で概要を、さらに2010年5月号ではAPI 670規格で示されているモニタシステムに関する要求事項や機能ブロックに関して説明しました。
API 670規格では、モニタシステムは「Signal processing」 「Alarm/Shutdown/Integrity logic processing」 「Power supply(ies)」 「Display indication」 「Inputs/Outputs」 「Protective relays」の6つの機能ブロックから構成されると書かれていますが、各機能ブロックのつながり、処理の流れについては示されていません。
そこで、今回は状態監視モニタの働きが分かるようなブロック図で示してみたいと思います。
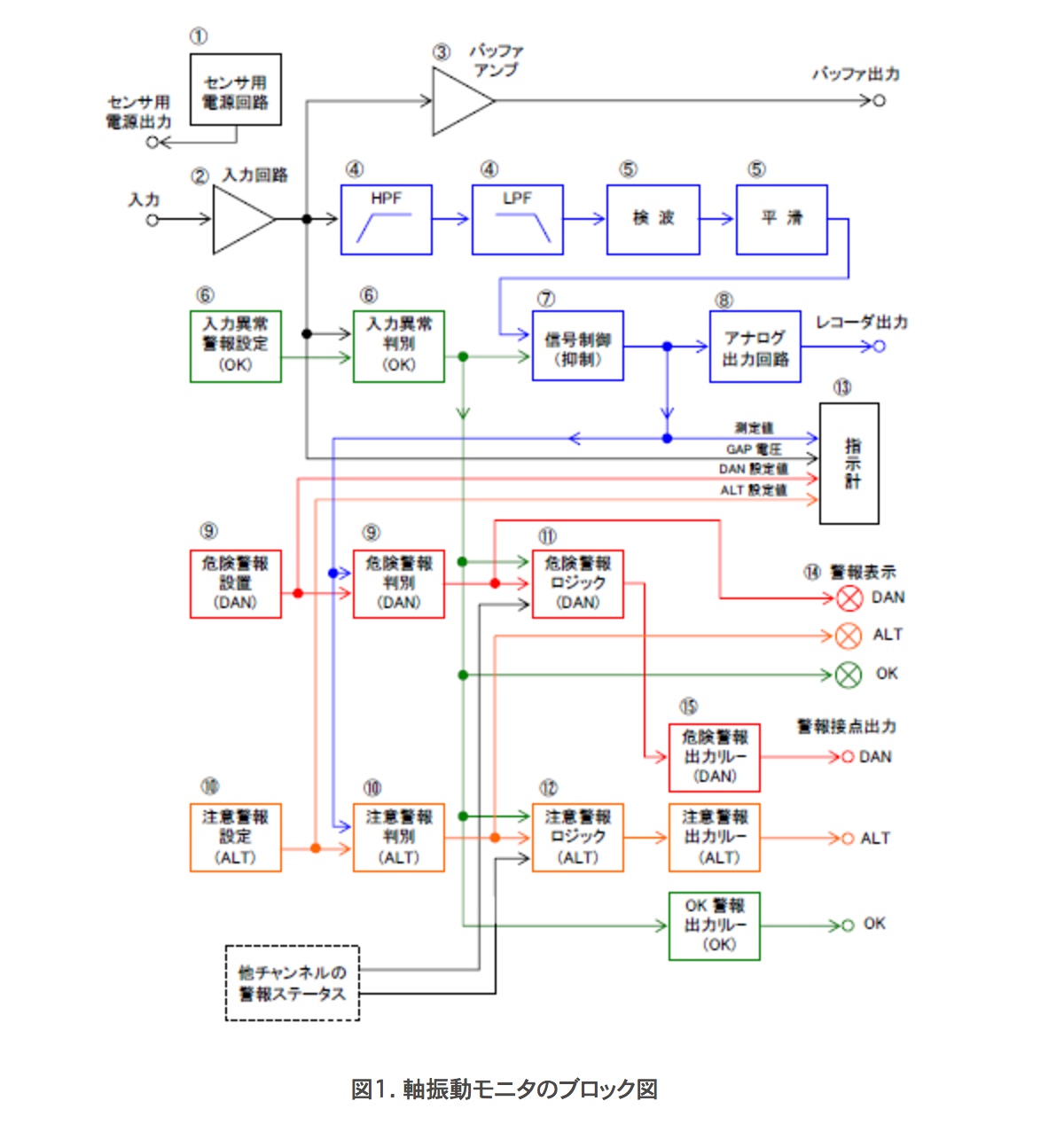
図1に軸振動モニタの1CH分のブロック図を示します。
このブロック図に付記した番号に沿って、その機能を説明します。
これにより、軸振動モニタがおおよそどのような働きをしているのかお分かりいただけると思います。
※このブロック図はアナログ処理ベースの軸振動モニタをイメージして書かれていますが、デジタル処理ベースのモニタにおいても各機能および処理の流れは基本的に同様です。
※このブロック図は軸振動モニタの基本的な機能を示すものであり、詳細機能まで全ての機能を網羅したものではありません。
1.センサ用電源回路
振動モニタに接続されるセンサを駆動するための電源です。
軸振動計として利用される渦電流式変位センサ(例えばFK-202Fトランスデューサ)を接続する振動モニタの場合、-24VDCのセンサ用電源を出力します。
(ケーシング振動計測のための圧電型センサ(例えばCA-302加速度トランスデューサやCV-86速度トランスデューサ等)を接続する振動モニタの場合、4mA(24VDC)の定電流電源を、図1とは異なり入力ラインを通して二線式のトランスデューサに供給します)。
2.入力回路
渦電流式変位センサ(例えばFK-202Fトランスデューサ)を接続します。
3.バッファアンプ
入力信号(振動波形)をそのまま出力するためのゲイン1倍のアンプです。
この信号(バッファ出力)は振動解析を行なう場合に常設の解析データ収集装置(例えばDAQpod AP-2000やDP-2000)や仮設の解析データ収集装置(例えばポータブル振動解析システムKenjin)に利用します。
バッファ出力は誤操作により短絡した場合でも、振動モニタの計測、監視機能に影響を与えないように設計されています。
4.HPF(ハイパスフィルタ)/LPF(ローパスフィルタ)
振動センサからの信号は直流信号(GAP電圧)に交流の振動波形成分が重畳された信号となっているため、振動変換処理ができるように直流成分を含む低周波数成分をHPFでカットします。
さらに不要な高域成分をLPFでカットします。
5.検波/平滑
振動波形を検波して振動振幅に比例した信号とし、平滑して脈動のない安定した直流信号に変換します。
軸振動の場合通常Peak to Peakの両振幅表示ですが、波形のピークとボトムを検出するP-P検波だけでなく、波形を整流・平滑する平均値検波や波形の実効値を演算するRMS検波を適用して両振幅に換算する場合もあります。
6.入力異常警報設定/入力異常判別(OK)
上下限の警報設定値を設け、入力信号がこの範囲を外れた場合は入力センサまたは結線の異常と判断してOK警報を発します(Not-OK状態)。
警報設定値はセンサの種類や本質安全防爆の有無によって変わります。
センサセットギャップの過大、過少、センサ/延長ケーブルの断線、短絡、ドライバの故障、伝送ケーブルの断線、短絡等により入力異常警報設定範囲を逸脱して入力異常状態(Not-OK状態)と判断します。
7.信号制御(抑制)
通常状態では、⑤により振動変換された直流信号をそのまま下流の処理ブロックに出力しますが、入力異常状態においては信号を振幅の0%または0Vに抑制します。
8.アナログ出力回路
振幅に比例した電流(4~20mADC)または電圧(1~5VDC)信号に変換して出力します。
9.危険警報設定/危険警報判別(DAN)
任意に設定された上限警報設定値と振動振幅の計測値を比較して、振動振幅値が警報設定値を一定時間(警報遅延時間:通常1~3秒程度に設定)以上超えると危険警報状態と判断します。
10.注意警報設定/注意警報判別(ALT)
任意に設定された上限警報設定値と振動振幅の計測値を比較して、振動振幅値が警報設定値を一定時間(警報遅延時間:通常1~3秒程度に設定)以上超えると注意警報状態と判断します。
11.危険警報ロジック(DAN)
自らのチャンネルの危険警報判別結果だけでなく、他のチャンネルの警報ステータス(DAN, ALT, OK)も含めてあらかじめ設定されたロジックに沿って危険警報出力リレーを動作させるための信号を出力します。
12.注意警報ロジック(ALT)
自らのチャンネルの注意警報判別結果だけでなく、他のチャンネルの警報ステータス(DAN, ALT, OK)も含めてあらかじめ設定されたロジックに沿って注意警報出力リレーを動作させるための信号を出力します。
13.指示計
測定値、GAP電圧、危険警報設定値、注意警報設定値を表示します。
14.警報表示灯(DAN, ALT, OK)
警報判別ブロック⑥⑨⑩において警報状態と判断した場合、対応する表示灯が点滅します。
なお、正常状態において、DAN表示灯(赤)とALT表示灯(橙)は消灯、OK表示灯(緑)は連続点灯します。
15.警報出力リレー(DAN, ALT, OK)
危険警報と注意警報はそれぞれの警報ロジック出力がON(警報状態)になると対応する警報出力リレーが警報状態となります。
OK警報は入力異常判別⑥でNot-OK状態と判断するとOK警報出力リレーが警報状態となります。
具体的な各ブロックの動作条件等の詳細説明はしていませんので、細かい動作は分かりにくい面もあるかもしれませんが、図1のブロック図と上記のブロック毎の説明である程度、軸振動モニタの働きを掴んでいただけたのではないかと思います。
次回は、追加の補足説明や他のモニタに関する説明を予定しています。
出典:『技術コラム 回転機械の状態監視や解析診断』新川電機株式会社
![]()