![]()
2017/5/30 ものづくりニュース
【振動の三種類の測定パラメータ】vol.1 調和振動における変位、速度、加速度の関係
機械振動とは、『機械系の運動または、変位を表す量の大きさが、ある平均値または基準値よりも大きい状態と小さい状態とを交互に繰り返す時間的変化』と定義されます。
その振動を測定して表現する場合、「変位」「速度」「加速度」の三種類の測定パラメータで表現することができます。
これまで、機械の状態監視に適用される振動センサとして、渦電流式変位センサ、動電型速度センサ、圧電型加速度センサ、圧電型速度センサについて説明してきましたが、今回は、これらの違いと使い分けに関してより深く理解していただくために、振動の「変位」「速度」「加速度」の関係について説明します。
調和振動と位相差
図1に示すように、理想的なバネとおもりだけから構成される単純な系(減衰がないものとする)のおもりを平衡点から下に変位Dだけ引張った状態とし、その状態から開放すると、平衡点を中心(ゼロ点)として上限値「+D」、下限値「-D」を一定時間毎に繰り返すような運動をします。
これを調和振動と呼び、おもりの位置の時間変化をグラフで表すと図1のようにサイン波形になり、(式1)で表すことができます。
ここで、Dの値を片振幅、2Dの値を両振幅と呼びます。
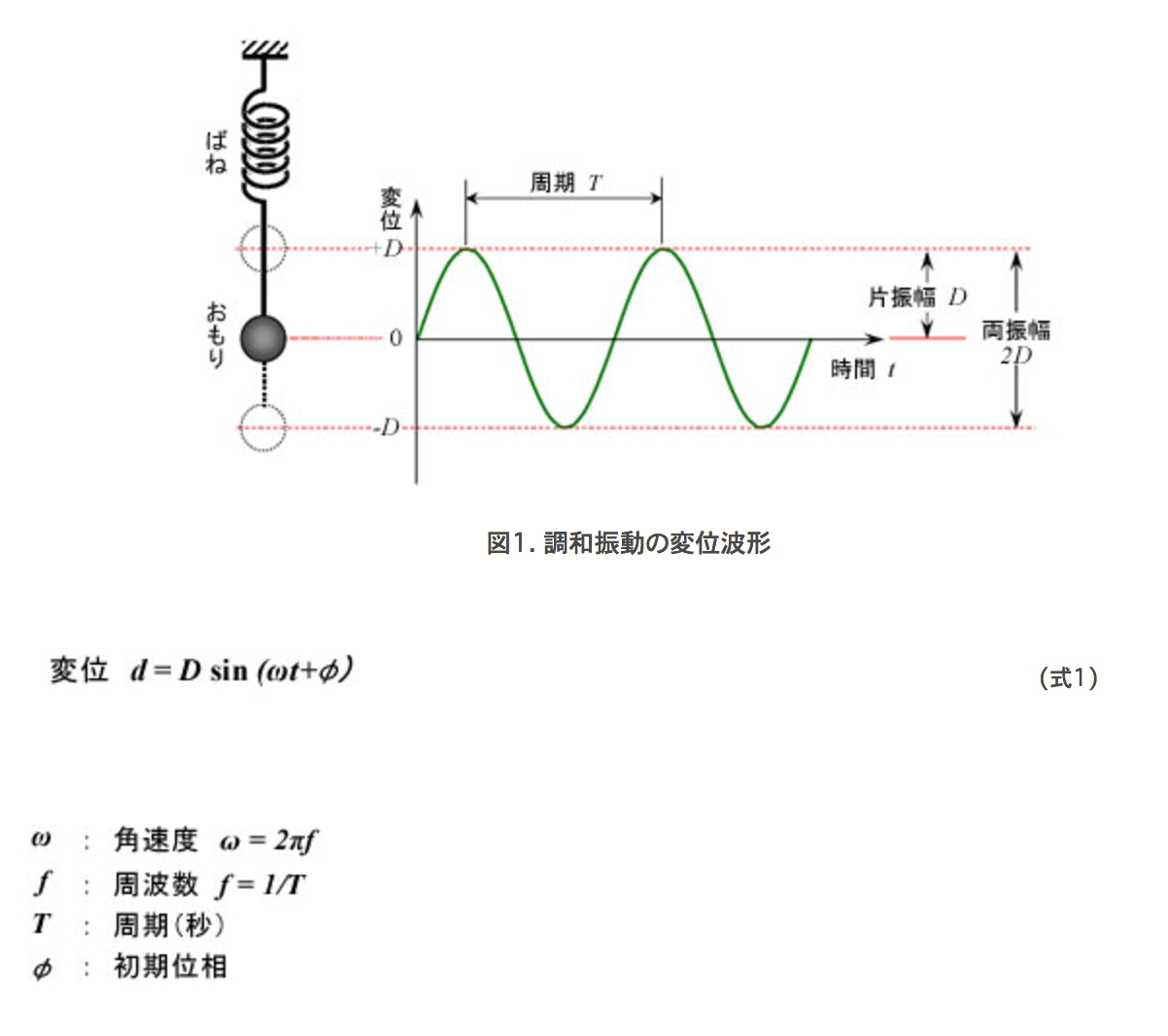
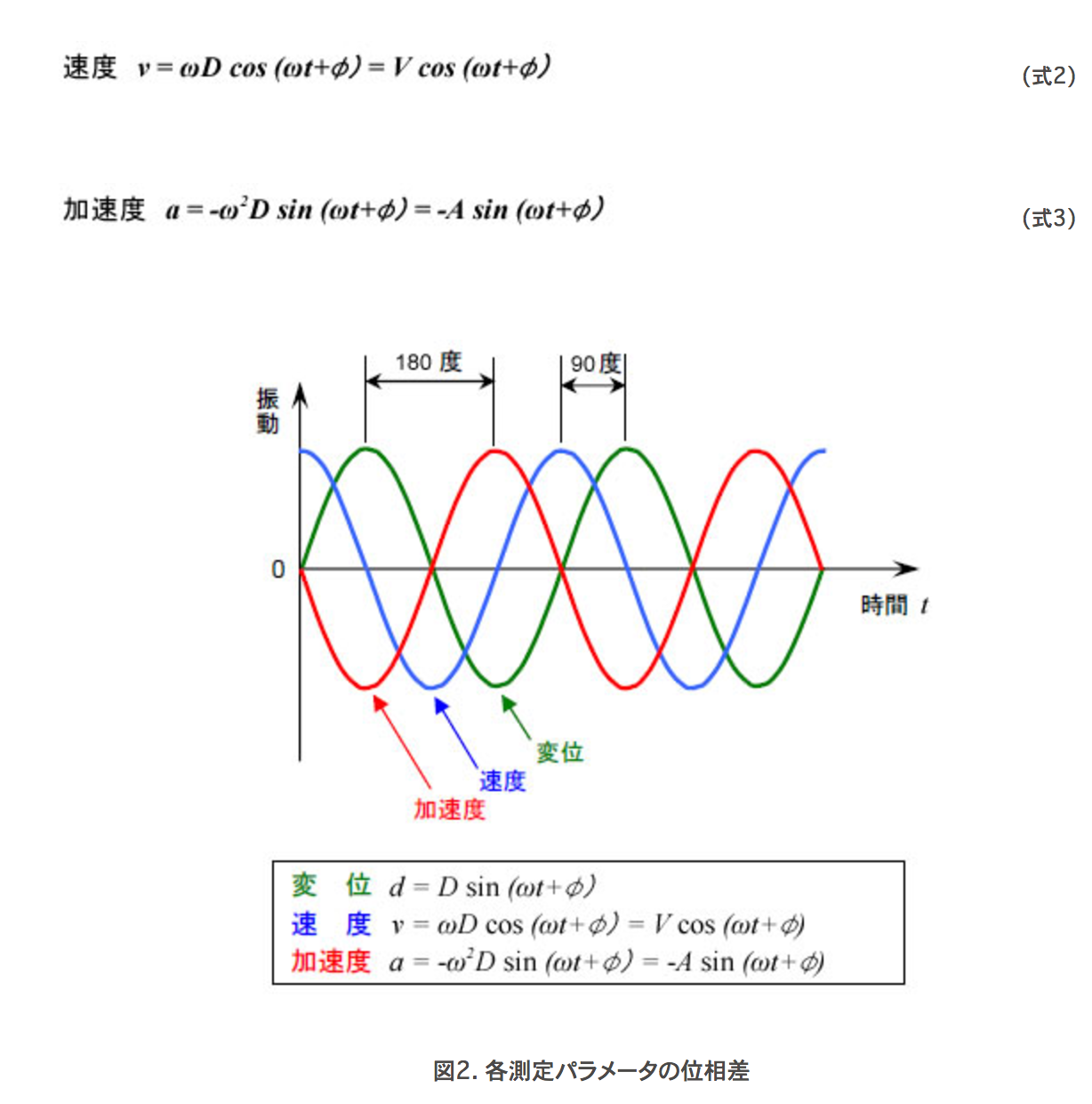
図1は時間軸グラフ上に振動変位をプロットした波形で表したものですが、(式1)を微分することで振動速度を、更に振動速度を微分することで振動加速度を導くことができます。これらをそれぞれ(式2)、(式3)に示します。
また、それぞれの波形グラフを図2に示します。
※グラフ上の「変位」「速度」「加速度」の振幅の大きさに関しては、それぞれ単位も異なる計測パラメータであり、このグラフ上での相互の振幅の大小は特に意味を持ちません。
従って、相互の位相の関係が分かりやすいように、グラフ上の振幅の大きさは同一に表現しています。
ここで、大文字のVは振動速度の大きさの片振幅(Peak値)を、Aは振動加速度の大きさの片振幅(Peak値)を表しています。
図2を見ると、速度は変位に対して90度の位相差があり、加速度は速度に対して90度、変位に対して180度の位相差があることが分かります。
微分するということは、元の曲線の各点の傾きを導き出しているとも言えるので、「変位」「速度」「加速度」の関係が図2のようになることが視覚的にも分かります。
もう少し平たく感覚的に表現すると、以下のように言えるかと思います。
変位と速度のグラフを見ると、変位がボトム(-D)となる時、下向きの動きから上向きの動きへの折り返し点であることから速度は当然ゼロとなり、そこから上向きに速度を速めながら、変位がゼロ点を通過する時、速度はピーク点(最大値)を取ります。
ここを過ぎると、徐々に速度を落としながら、変位はピーク点(+D)に到達しますが、この時上向きの動きから下向きへの動きの折り返し点であり、速度はゼロとなります。
今度はマイナス側に速度を増しながら変位ゼロの点に向かって移動して行き、ゼロ点を通過する時、速度はマイナス側の最大値(ボトム)を取ることになります。
次に変位と加速度のグラフを見てみます。
物体の運動方向を逆転しようとすると、運動の方向とは逆向きに大きな加速度が必要になると考えると、変位と加速度の関係を感覚的にイメージしやすくなると思います。
変位がボトム(-D)となる点は、下向きの動きから上向きの動きへの折り返し点ですので、加速度はプラス方向(上向き)に最大値となり、逆に変位がピーク点(+D)の時は、上向きの動きから下向きへの動きの折り返し点ですので、加速度はマイナス方向(下向き)に最大値となります。
上記は、調和振動における「変位」「速度」「加速度」のダイナミックな関係を感覚的に分かりやすく説明しようと試みたのですが、かえって難解になってしまったかもしれないです。
申し訳ありません。
次にもっと分かりやすい、「変位」「速度」「加速度」の振幅の大きさと振動周波数との関係について説明します。
各測定パラメータの周波数と振幅の大きさ
さて、(式2)(式3)において、時間tに伴って-1 ~ +1の範囲で変化するsin,cosの部分を削って、「変位」「速度」「加速度」の大きさのみに注目すると、それぞれの関係は(式4)~(式6)のように表されます。

なお、(式4)~(式6)の関係は、各測定パラメータの次元が合っていることが必要であり、例えば、変位Dの単位がm(メートル)であれば、速度Vはm/s(メートル毎秒)、加速度Aはm/s2(メートル毎秒毎秒)ということになります。
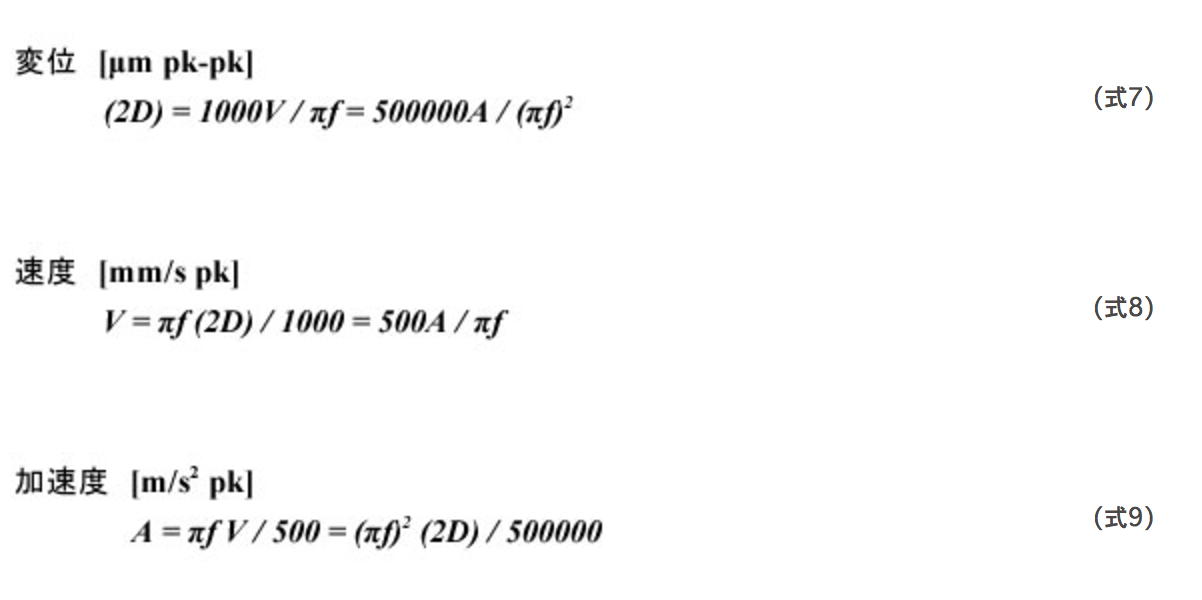
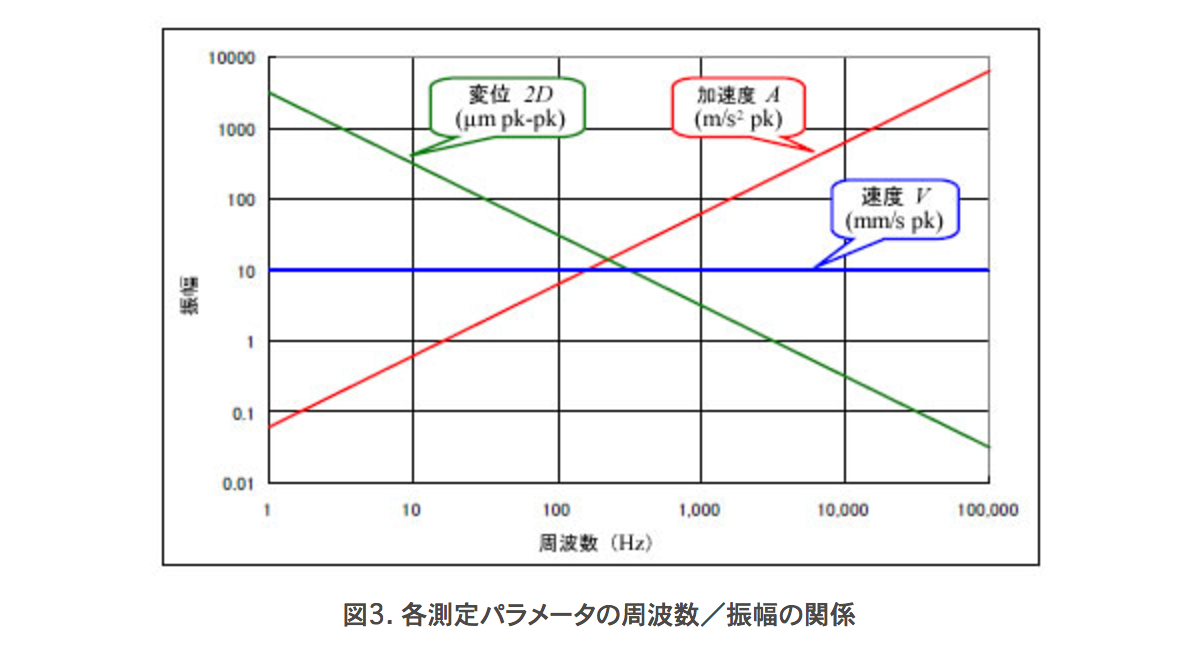
これを実用的な単位で表し、変位に関しては両振幅(2D)として「変位 μm pk-pk」「速度 mm/s pk」「加速度 m/s2pk」の関係を示すと、(式7)~(式9)のようになります(pk-pkは両振幅のpeak to peak値であることを、pkは片振幅のpeak値であることを示しています)。
ここで、全周波数帯域において振動速度V = 10 mm/s pk一定で振動するものがあると仮定して、(式7)と(式9)に V = 10 mm/s pkを代入すると、図3のような特性グラフが描けます。
さて、このグラフから見えてくるものは何でしょうか。
そのことについてはまた次回の説明とさせていただきます。
【参考文献】
・回転機械診断の進め方:豊田利夫[日本プラントメンテナンス協会]
・ISO規準に基く機械設備の状態監視と診断(振動 カテゴリーⅠ):振動技術研究会(v_TECH)
出典:『技術コラム 回転機械の状態監視や解析診断』新川電機株式会社
![]()