![]()
2016/5/6 ものづくりニュース
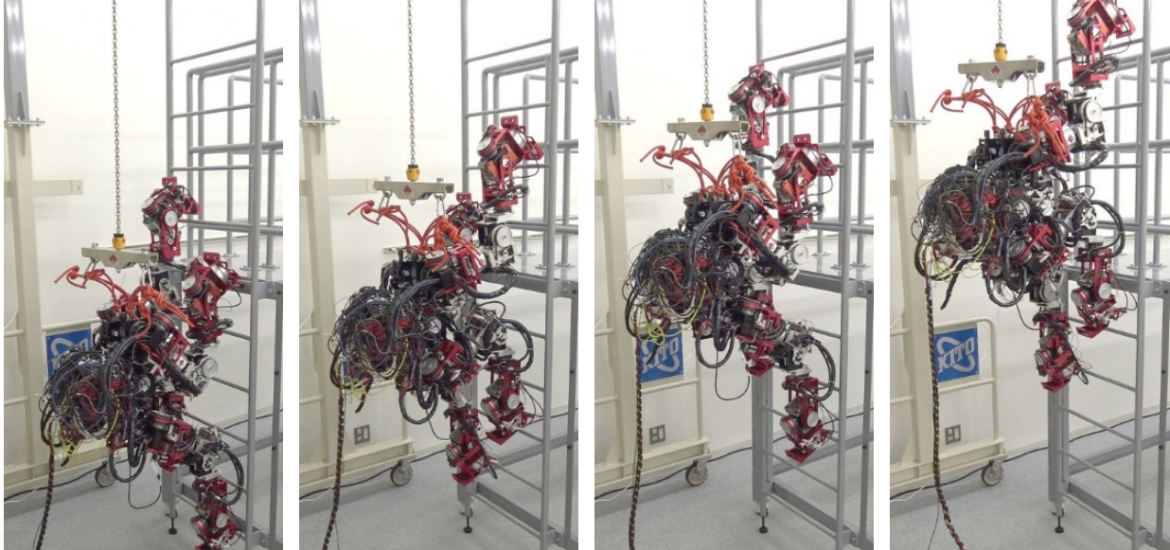
早大と三菱重工、従来より12倍速く垂直はしご昇降ができる脚型ロボットを開発
早稲田大学と三菱重工業株式会社は、従来より12倍速く垂直はしごの昇降ができる新しい脚型ロボットを開発したと発表した。
これまで垂直はしごの昇降は、滑落を防ぐために4肢のうち3つを固定した3点支持で成功していたが、昇降にかかる時間が長いという課題を抱えていた。これに対し早稲田大学と三菱重工は、脚型ロボットのための2点支持での垂直はしご昇降が可能なアルゴリズムを開発。12倍のスピードアップを実現した。
2点支持の場合、2箇所の把持点を結んだ稜線まわりに機体が回転してしまい垂直はしごから滑落する危険性が高くなる。そのため垂直はしご上で機体を安定させるためには稜線まわりのモーメントを小さくする必要があるが、全身の各質点の動き、および把持点での反力を適切に制御することで滑落を防止するアルゴリズムを考案したという。
またこのアルゴリズムを応用することで床面から垂直はしごへの取り付き動作も可能になったとのこと。プラントや発電所内の移動には垂直はしごが欠かせない。非常時だけでなく、平常時にも老朽インフラ・プラントの保守点検や災害予防のために運用できるという。
![]()
株式会社アペルザで「ものニュー」の記事制作をはじめ、コンテンツ制作を担当しています。これまでひたすら文系人生だったこともあり、ものづくり関しては何がわからないのかもわからないレベルです。ものニューを通じて私も知見を広げていきます。得意なことはけん玉で、特にうぐいすと灯台系は自信があります。