![]()
2017/8/30 ものづくりニュース
シーケンス制御講座「CC-Link」
基礎からはじめるシーケンス制御講座
中級:CC-Link
CC-Linkは三菱電機株式会社により開発されたフィールドネットワークです。通信方式や仕様などの難しい説明はここでは行いません。
通信方式などの細かい部分は分からなくても問題ありません。CC-Linkを使用するために必要な部分を説明します。詳しく知りたい方は、下記サイトよりお願いします。
CC-Link協会
CC-Linkにはいくつか種類がありますが、ここでは通常のCC-Linkで説明します。
では通常ではないCC-Linkとは? ということになりますが、それはCC-LinkIEやCC-Link/LTのように、CC-Linkの後ろに何か記号がついているものです。
例えばCC-LinkIEでは、伝送方式をイーサーネットベースで開発されているため、接続ケーブル自体が違います。CC-Linkを使うときは、使用機器すべてを同じCC-Linkの種類に統一してください。今回はCC-Linkの後ろに何も記号がない通常のCC-Linkで解説します。
CC-Linkはロボットコントローラや、数が多い電磁弁の接続などが大変簡単になります。
ロボットコントローラの場合、普通にI/Oで接続するだけでもかなりの本数の線を接続する必要があります。
またPLC側のI/O点数を考えながら接続しますので、必要ない線は接続しない場合もあります。そんなとき設備仕様が変更となり、接続していなかった線を接続することになると、とてもめんどうな作業となります。
こんな時はCC-LINKで接続すれば、大変簡単になります。
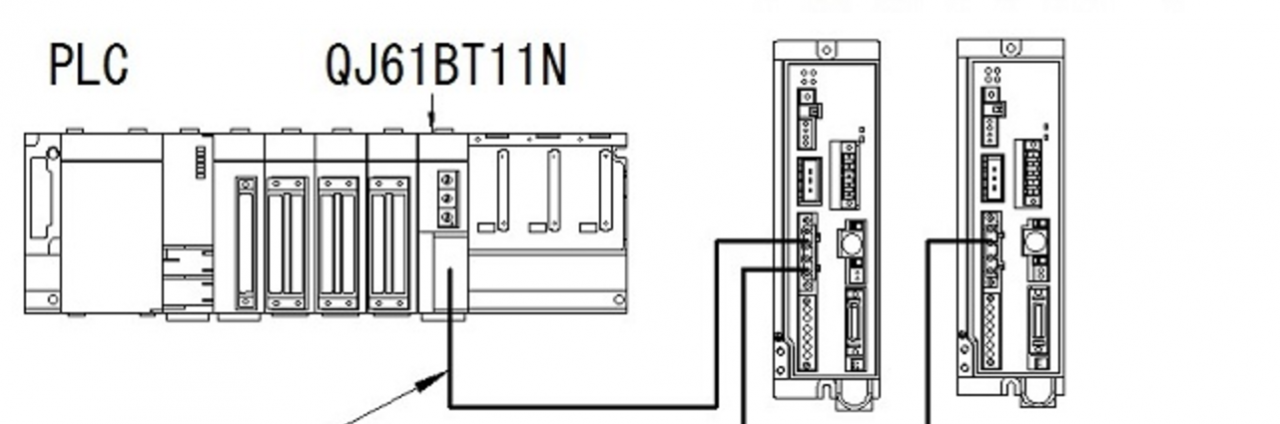
ロボットコントローラがCC-Linkに対応している必要がありますが、I/O線の変わりにCC-Linkケーブルを接続するだけです。
しかもたったの4本。これですべてのI/O線を接続した時以上の機能が使えます。さらにほかにCC-Link機器がある場合、そのまま次の機器にケーブルを接続(渡す)するだけで配線が完了となります。
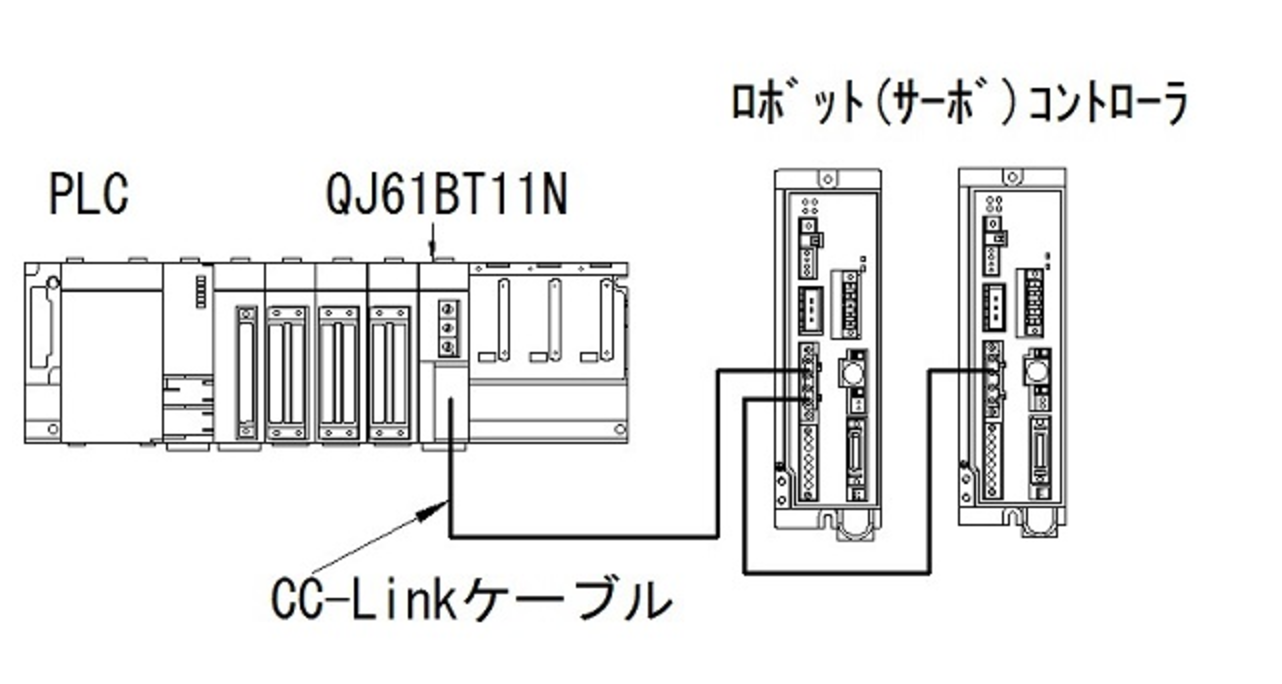
今回はQシリーズのCC-Linkユニット「QJ61BT11N」を例に解説します。
またCC-Linkで接続すると接続機器の入力ユニットや出力ユニットが必要なくなるため、単純にCC-Link分のコストが上がるだけではなく、必要なくなるユニットのコストは差し引くことができます。
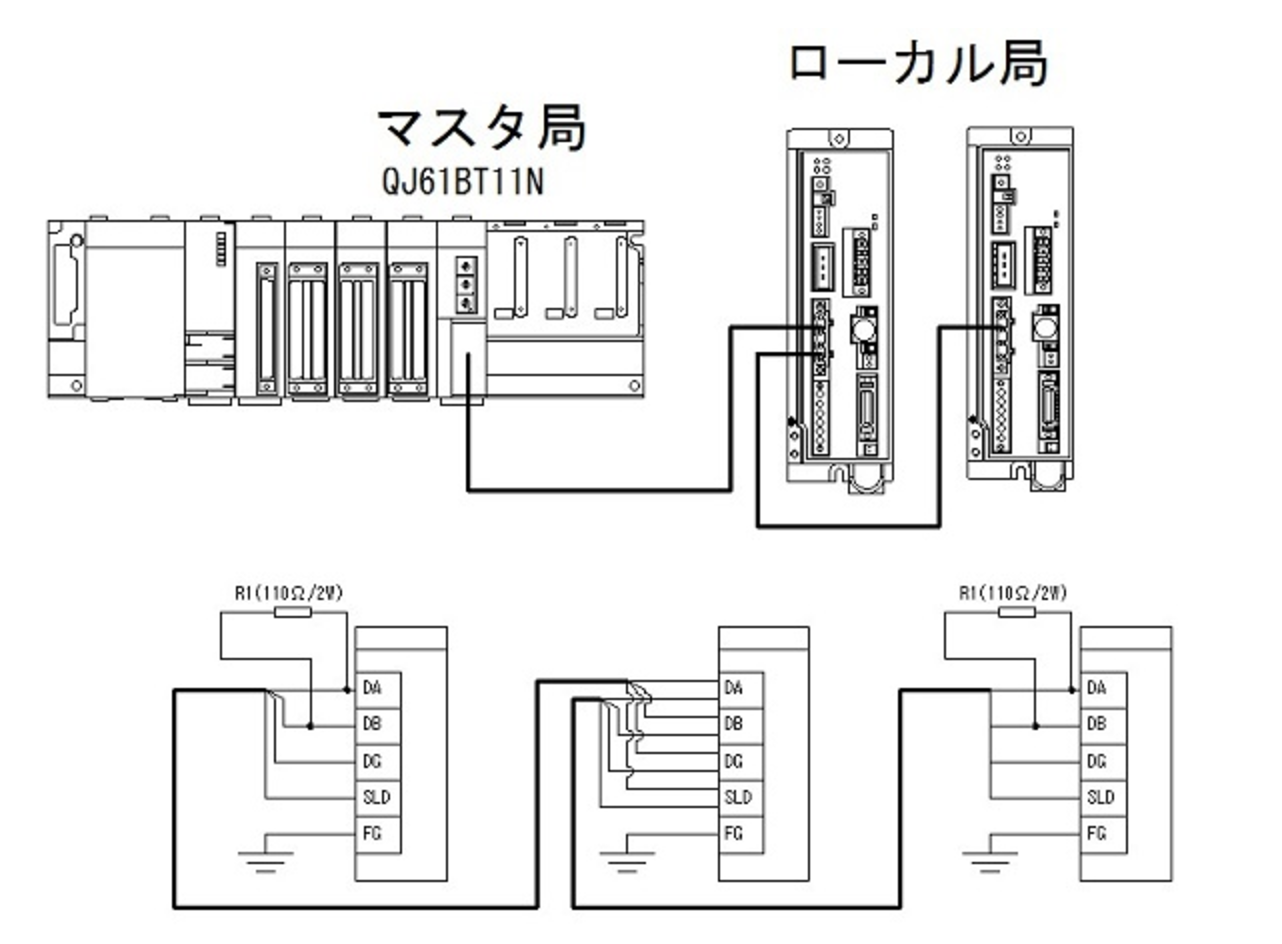
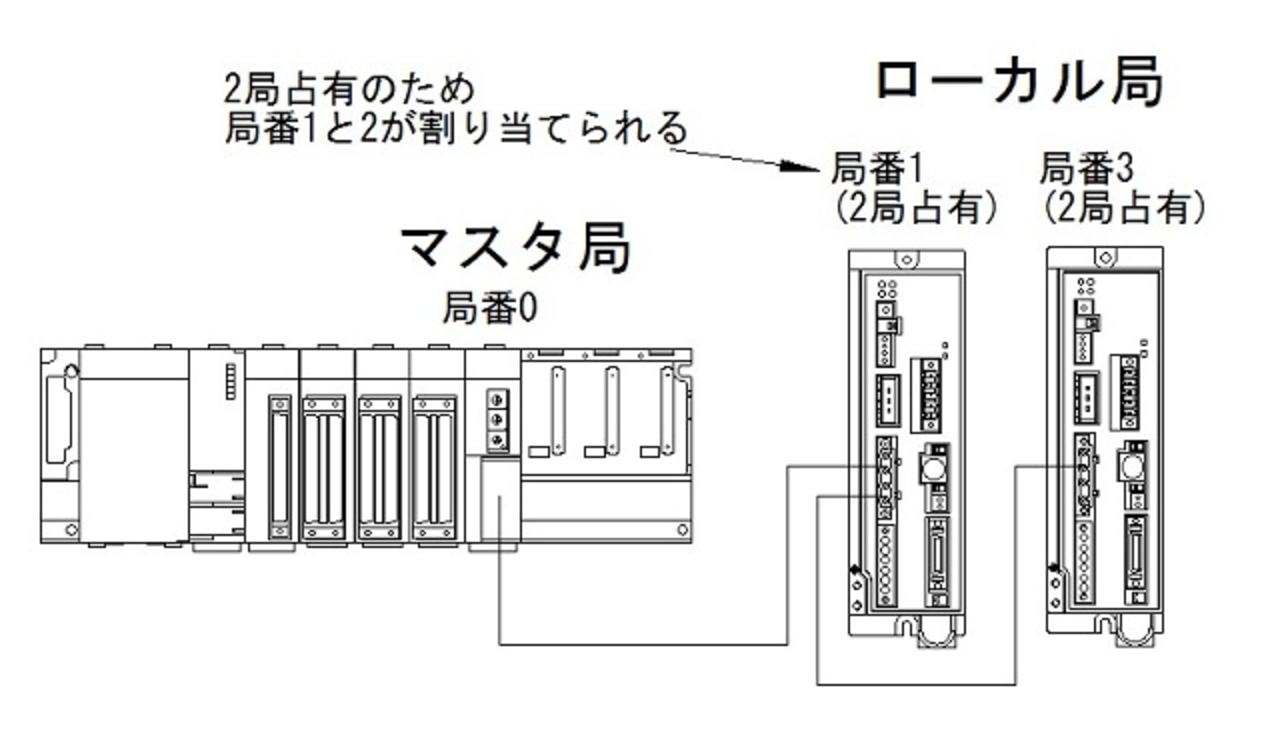
上図のように接続します。必ずマスター局とローカル局(子局)で構成されます。
基本的にはPLC側がマスタ局になります。マスター局がローカル局をコントロールするイメージです。各ユニットをCC-Linkで接続していきますが、接続の両端に終端抵抗を取り付けます。これはCC-Linkの機器に付属で入っています。
リモートI/OはCC-Linkの入出力ユニットと考えてください。CC-Linkを通して信号が入出力されます。別途入出力ユニットは必要ありません。
こんな感じで配線作業はものすごく省略されます。
ただしリモートI/OをPLCと同じ制御盤内に設置することはあまり意味がありません。I/Oへセンサー信号などを入力するときは、必ず配線作業が発生します。
この部分は省略できないためです。どこが省略されるかというと、PLCと端子台の間です。
通常の入出力ユニットと端子台の組み合わせでも、市販の接続ケーブルが使用できます。場合にもよりますが、わざわざこの部分をCC-Link化する必要性はありません。
制御盤から離れた位置にI/O端子台を設置したい場合は、CC-Link接続してリモートI/Oを設置すると配線を引き込む作業が楽になります。
配線作業はとても簡単になりますが、代わりに設定作業が必要です。この作業、実は慣れていないと大変ですし、CC-Linkの機器をたくさん接続している状態で設定を間違えると、デバイス番号がずれてしまうという大変なことになります。
設定は間違えないようにしっかり確認しながら行ってください。では設定方法の説明を行います。
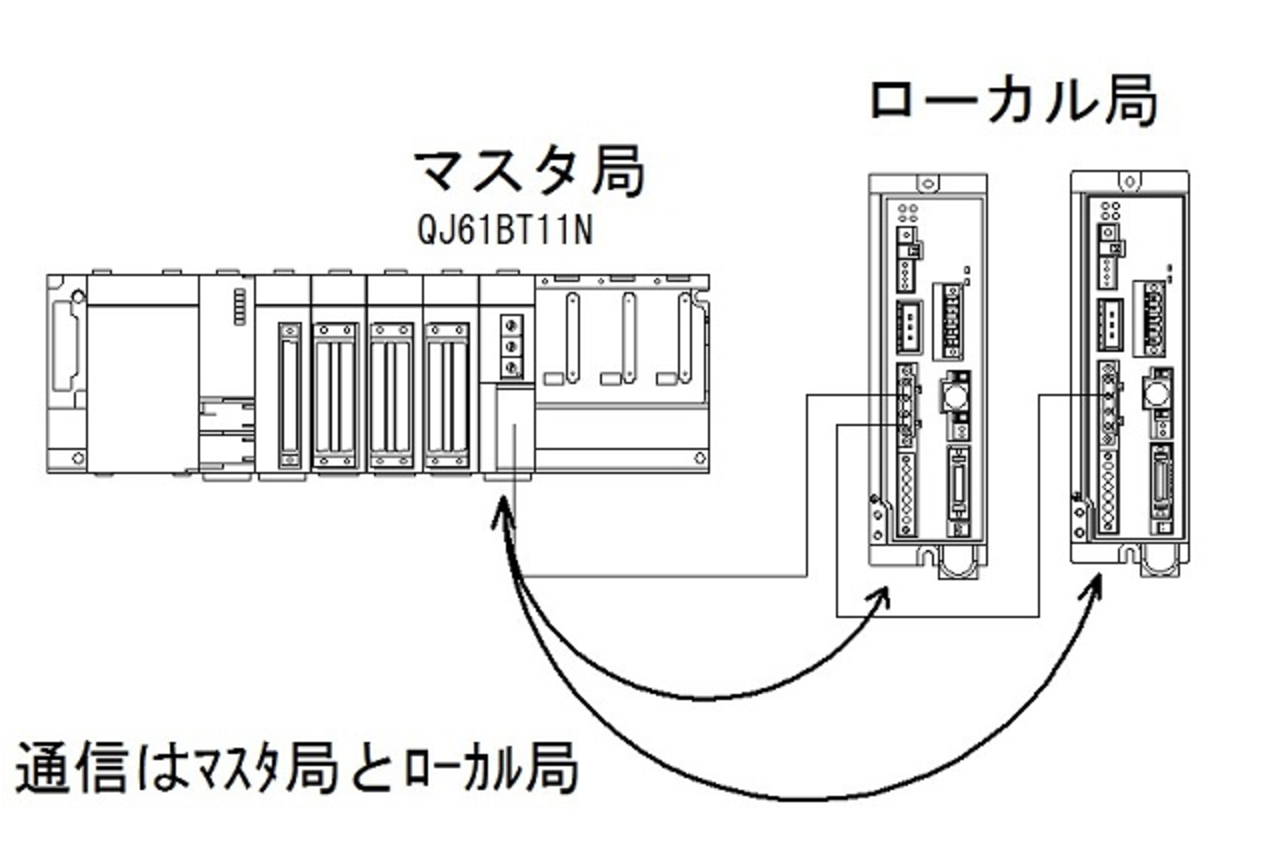
設定の前に基本的な説明をします。CC-Linkにはマスタ局とローカル局が存在します。
マスタ局が複数のローカル局を管理してネットワークが成り立っています。
マスタ局とローカル局は通信できますが、ローカル局とローカル局では直接通信できないと考えてください。そのため基本的にマスタ局はPLCとなります。
次に局番です。局番はアドレスみたいなものです。
マスタ局からは局番でローカルの機器を探すため、局番が設定されていないとネットワークには入れません。
また局番を間違えると思わぬ動作をして危険なこともありますので、注意してください。ちなみにマスタ局は局番0です。
占有局数ですが、これはローカルの機器一台に対し局番を何個与えるかの設定です。ローカル機器それぞれに設定します。
もちろん占有局数が多いほど多機能となります。ただし、CC-Linkの局番上限は64です。例えば局番1に4極占有設定にすると、局番1の機器には局番1~4が割り当てられます。
そのため次の機器は局番5となります。占有局数が多いほど、接続できる合計台数が少なくなるので注意してください。
まずはハード的に機器同士をCC-Linkケーブルで接続します。
複数の機器がある場合は、マスタ(PLC側)→機器1→機器2のように接続していってください。
そして接続の最初と最後に付属の終端抵抗を接続しておきます。
接続したあとはCC-Linkの通信速度を決めます。ローカル機器もそれぞれ設定できると思いますが同じ値に設定してください。
全体で設定できる上限でいいと思います。例えばずべての接続機器が10Mbpsまで対応できれば10Mbpsに設定します。一台でも5Mbpsしか設定できない機器が入れば5Mbpsに設定します。
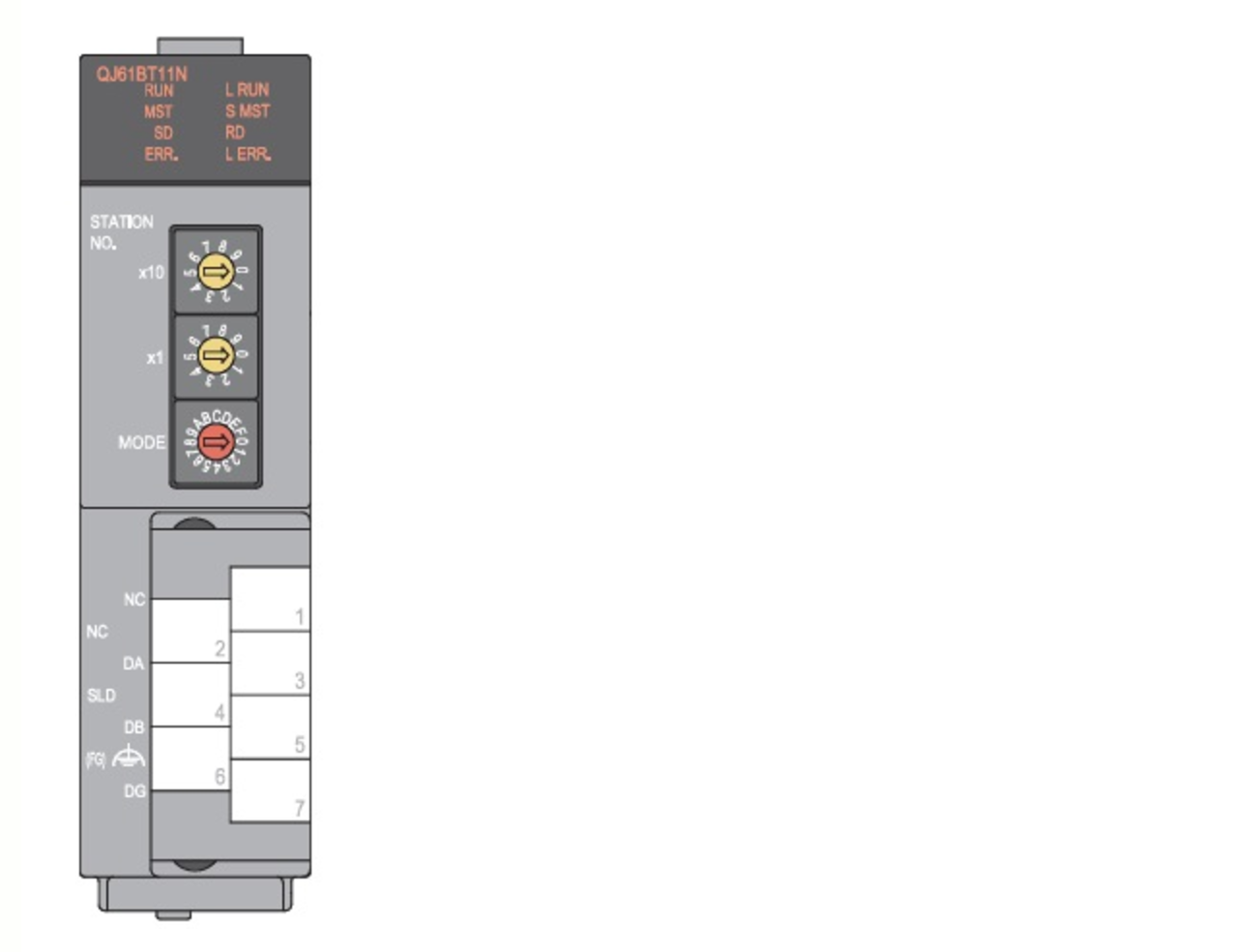
設定方法ですが、ユニット表面に切替スイッチがあるタイプと、パソコンを接続して設定するタイプの機器などさまざまです。「QJ61BT11N」は表面のロータリースイッチで設定します。マスタ局にするため局番も0に設定しておきましょう。STATION NOというスイッチです。
ここから局番などの設定ですが最初は難しいと思いますが、一度設定してしまえば理解できると思います。
最初に各機器の局種別、占有局数やCC-Linkバージョンを確認します。「QJ61BT11N」はバージョン1と2に対応しています。
バージョン1と2は混在できますので深く考える必要はありません。 この内容は各機器によって決まっています。各機器のマニュアルを参照してください。それと使用する機能によって変化するものもあります。IAIのコントローラでは、ハーフ直値制御では2局占有となりますが、フル直値制御では4局占有となります。
局種別も機器によって決まっています。入出力端子台などはリモートIO局になります。これはワードデバイスを必要とせず、ビットデバイスのみを使用する局です。
IAIのコントローラーなどはワードデバイスも使用するため、リモートデバイス局となります。PLCなどのCPUを持っている機器はインテリジェントデバイス局となります。
しかしこんなことをいちいち覚える必要はありません。使用する機器のマニュアルに書いてありますので、その通りに設定してください。
占有局数については、その機器のサポートセンターに電話すれば教えてくれます。そのとき必要なのは、どのような機能を使うかです。もちろんマニュアルにも記載されています。
大切なのは占有局数やバージョンなどはマスタ局側(PLC側)で設定するのはなく、ローカル側の機器の使い方によって決まり、PLC側は接続機器の情報として設定するだけです。
ローカル局側にも同じようなことがいえます。ローカル局は占有局数を設定する項目はありません。(インテリジェントデバイス局は例外です) ローカル局側の設定では、局番と通信速度位でしょうか。
あとはローカル局側の機器のパラメータ設定により使い方を決めたら、占有局数やバージョン、倍率は自動的に決まってしまいます。
占有局数やバージョンはPLC側で設定するものではなく、その機器の機能により自動的に決まってしまうということを理解してください。
各ローカル局側の機器設定が終わったら局番を設定します。各機器の局番設定に順番はありません。CC-Linkの接続順番通りに設定する必要はありません。好きな順番にしてください。
機器①
リモートデバイス局Ver.1
2局占有
機器②
リモートデバイス局Ver.1
2局占有
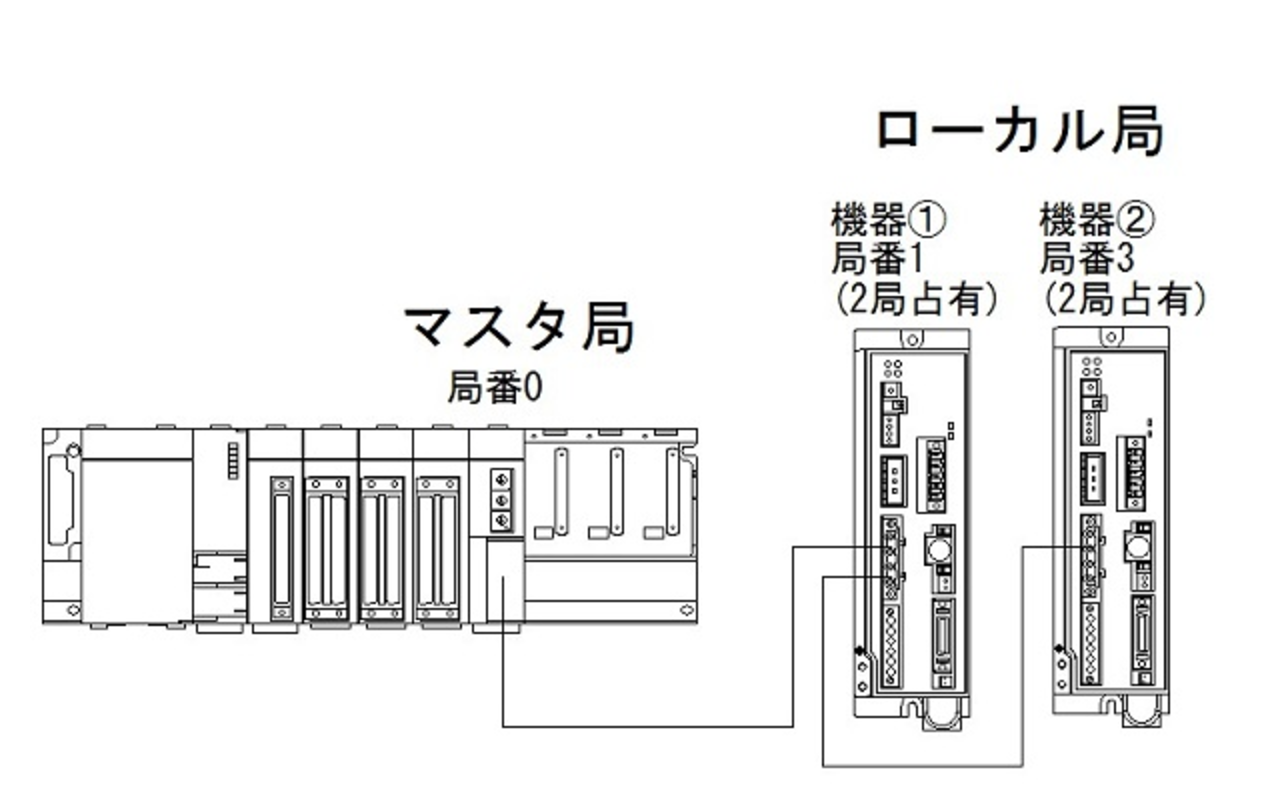
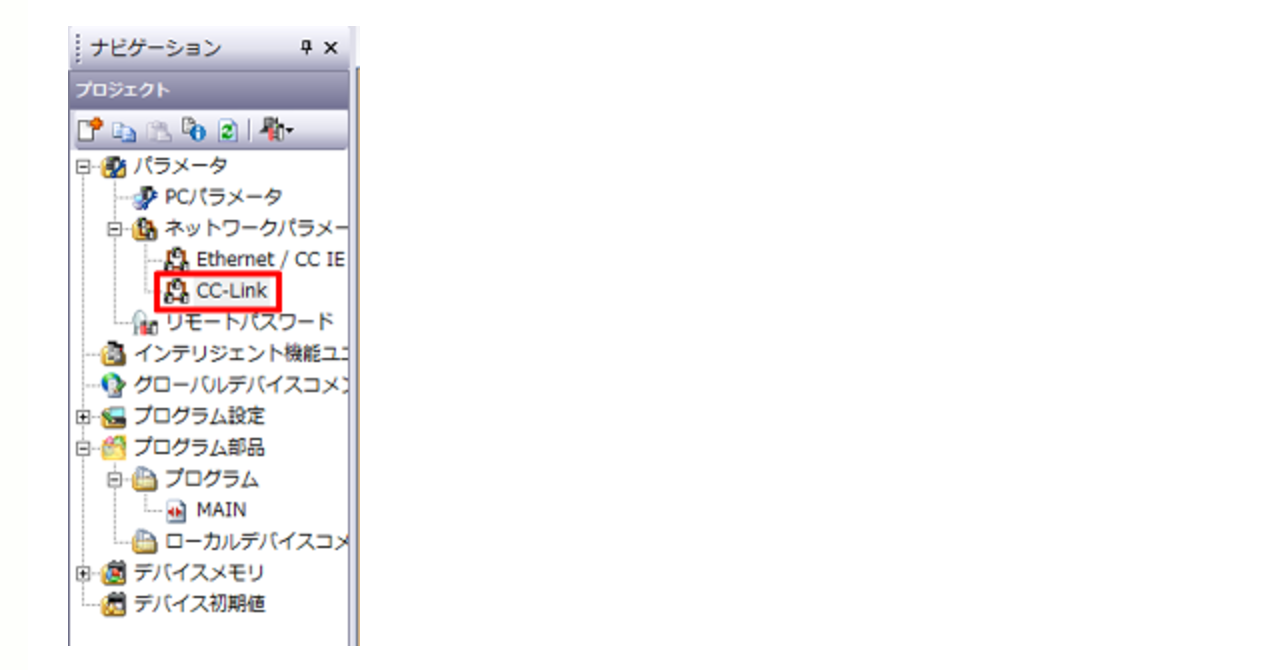
仮に上記機器を接続するとします。機器①を局番1に設定します。GX Works2を開いて左側のナビゲーション内の「パラメータ」→「ネットワークパラメータ」→「CC-Link」を開きます(GX Developerも同じです)。
最初に開いたときはユニット枚数の部分が空白になっています。
ここは「QJ61BT11N」の台数を入力します。とりあえず1台なので「1」にしてください。次にローカル局側の機器にリモートデバイス局Ver.2という機器があるので、モード設定の部分を「リモートネット-Ver.2モード」に設定します。
下位互換があるので、特に理由がない限りVer.2にしておいてもかまいません。
次はリモート入力(RX)とリモート出力(RY)です。これはCC-Linkネットワーク内のローカル局とやり取りするI/Oです。特に難しく考える必要はなく、ただの入出力です。
一応外部機器なので「X」と「Y」のデバイスで設定しようと思います。
ただ、普通に若い番号を使用すると入出力の番号と重複してしまうので、通常では使用しないような番号を割付ます。リモート入力(RX)には「X400」。
リモート出力(RY)には「Y400」と設定します。 通常の入出力IOの番号と大きく離れているので、「これはCC-Linkで接続されている機器だな」と分かりやすいと思います。
通常の入出力IOの番と近いようでしたらもっと離してもいいと思います。ここは自由に設定できるので、使いやすいように設定してください。
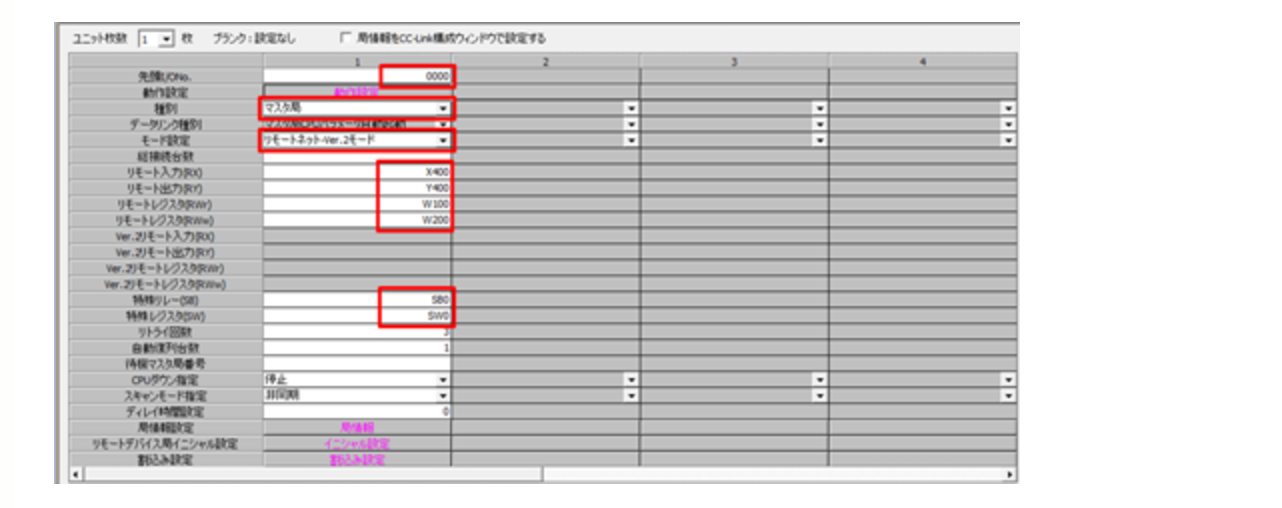
リモートレジスタも同じようにローカル局とやり取りするワードデバイスです。
データレジスタを設定してもいいのですが、区別するためにリンクレジスタ(W)を設定します。(RWr)に「W100」。(RWw)に「W200」を設定しました。
なぜ2つ設定する必要があるのかというと、ラダー図内で使用するワードデバイスは通常「参照」設定となります。
「W100」に値を書き込めば、値を変更でき、ラダー図上のどの位置からでも読み書きできます。しかしCC-Link上では「値渡し」となります。
「W200」に値を書き込めば、ローカル局の機器に届き命令できます。逆にローカル局側からの返信は「W100」へ帰ってきます。このワードデバイスは書込専用、読込専用となります。
そのため「W100」にラダー図上で何か書き込んでも、すぐにローカル局側から上書きされます。上書きされなかったとしても、ローカル局側はこのデバイスを監視できないので何も起こりません。ワードデバイスの入出力と考えてください。入力専用と出力専用です。
※W100やW200はラダー図上で使用するための設定で、ローカル局の各機器側にはW100もW200もありません。ローカル局側は設定する必要もありません。
特殊リレーと特殊レジスタはそのまま「SB0」と「SW0」と設定してください。
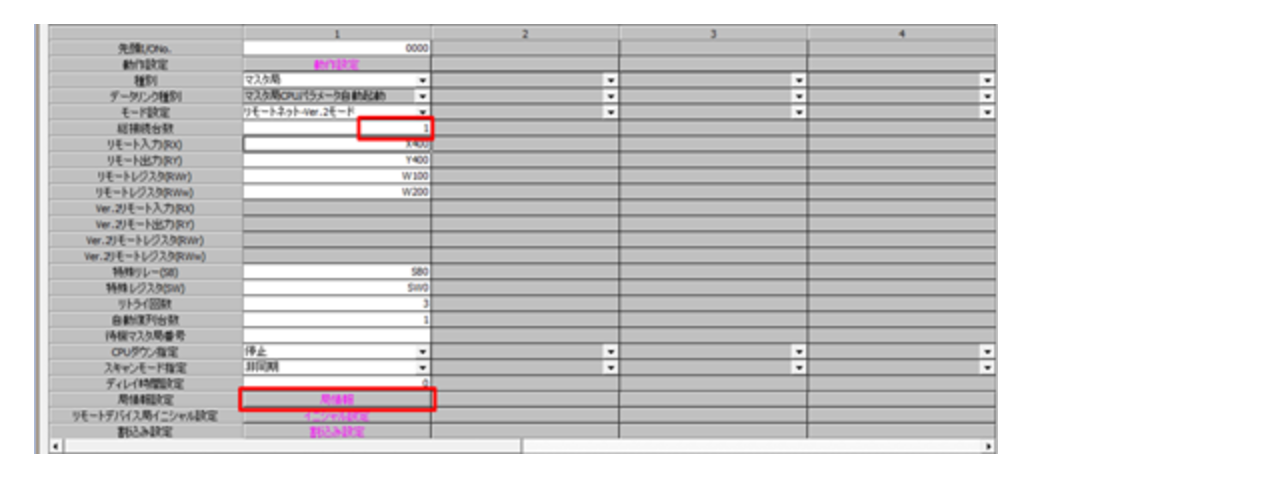
そして設定のポイントですが、設定は1台ずつ行います。慣れた人は分かるのでまとめて設定しますが、最初は混乱するので1台ずつ設定します。
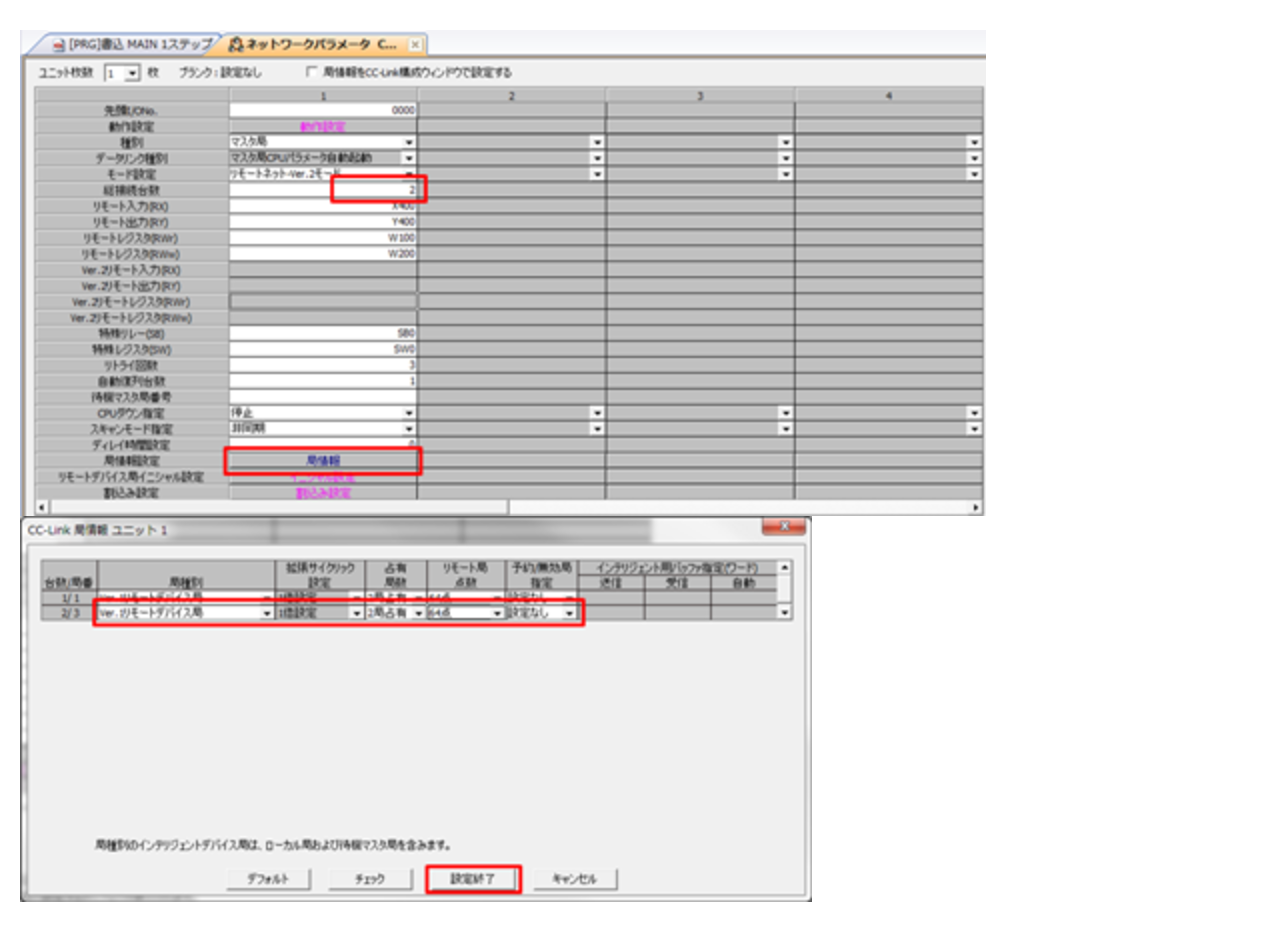
ということでローカル局は2台ありますが、総接続台数を「1」にしてください。次に局情報のボタンを押します。
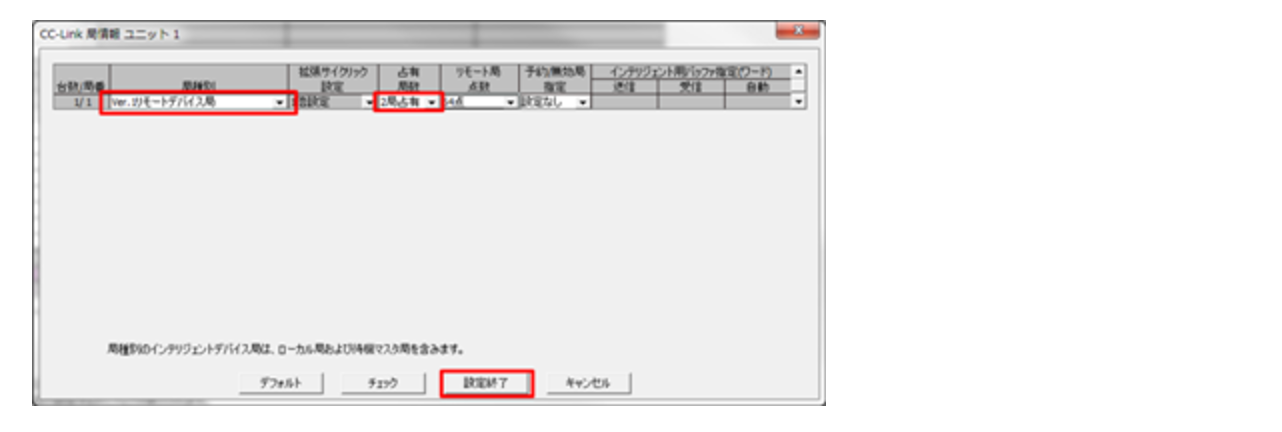
ここに機器①の内容を入力します。局種別は「Ver.1リモートデバイス局」。
占有局数は「2局占有」
リモート局点数と予約/無効局指定はそのままにしておきます。これで設定終了を押します。ネットワークパラメータの画面も設定終了を押します。
次にデバイス使用リストを表示してください。
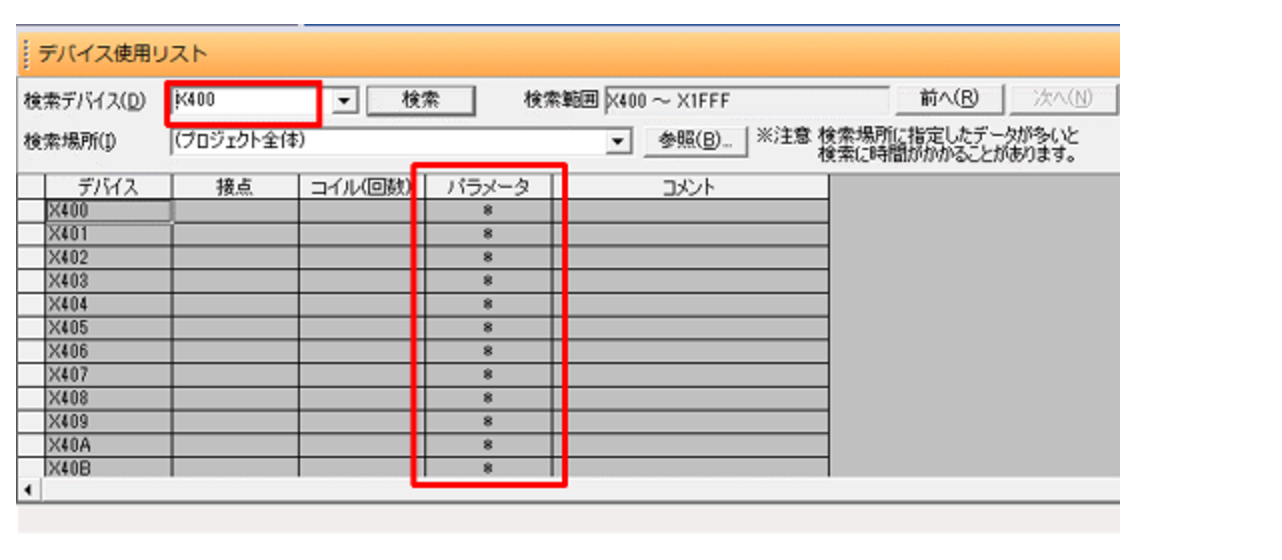
先ほど設定した「X400」を表示します。パラメータの列に「*」がついていると思います。これがCC-Linkで割り当てられているデバイスです。
この例でいくと「X400」〜「X43F」まで「*」がついています。
次に「W100」を表示します。すると「W100」〜「W107」に「*」がついています「W200」も同じように確認します。すると以下のことが分かります。
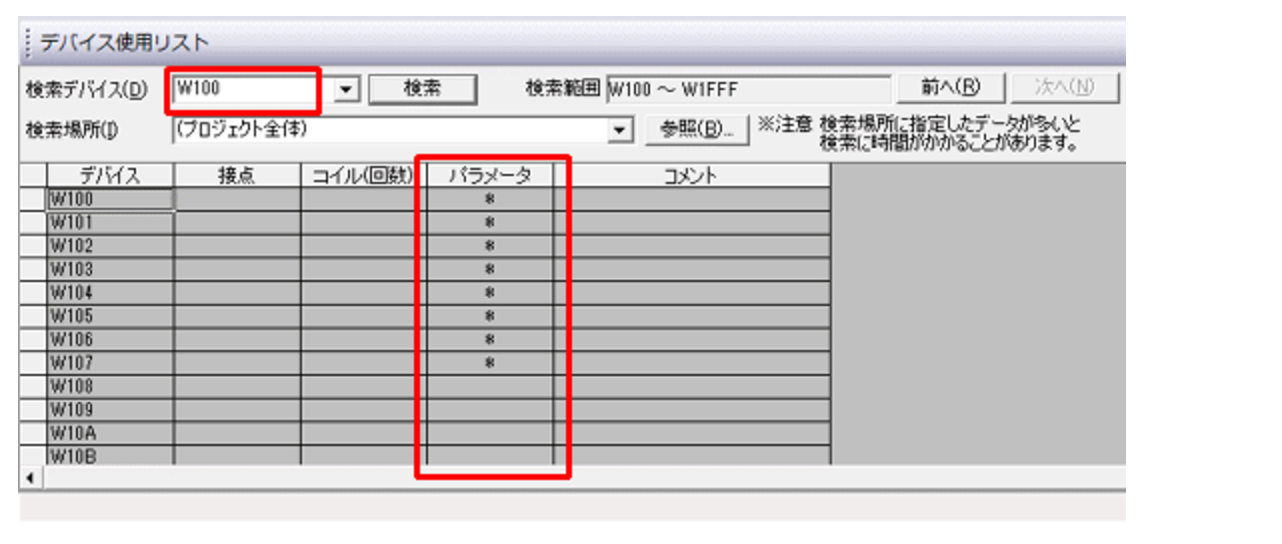
機器①の割付
入力デバイス:X400~X43F
出力デバイス:Y400~Y43F
入力ワードデバイス:W100~W107
出力ワードデバイス:W200~W207
このように1台ずつ設定すれば、デバイスの割付が確実に分かります。
実はデバイスは1局占有に対し、何点割り付けられるかは決まっています。ですが最初の段階で間違えると、残りのデバイス番号もずれてしまうので、やはり1台ずつ確実に設定することをおすすめします。
もし複数台数同時に設定した場合はデバイスリストで確認したとき、「*」が台数分ついていて、境目が分かりません。1台目の次はすぐに2台目のデバイスが割り当てられるためです。
ちなみにリモートI/O局に設定した場合、ワードレジスタは設定されません。このあたりもデバイス使用リストから判断できます。
入出力デバイスであれば下記の画面からも確認できます。
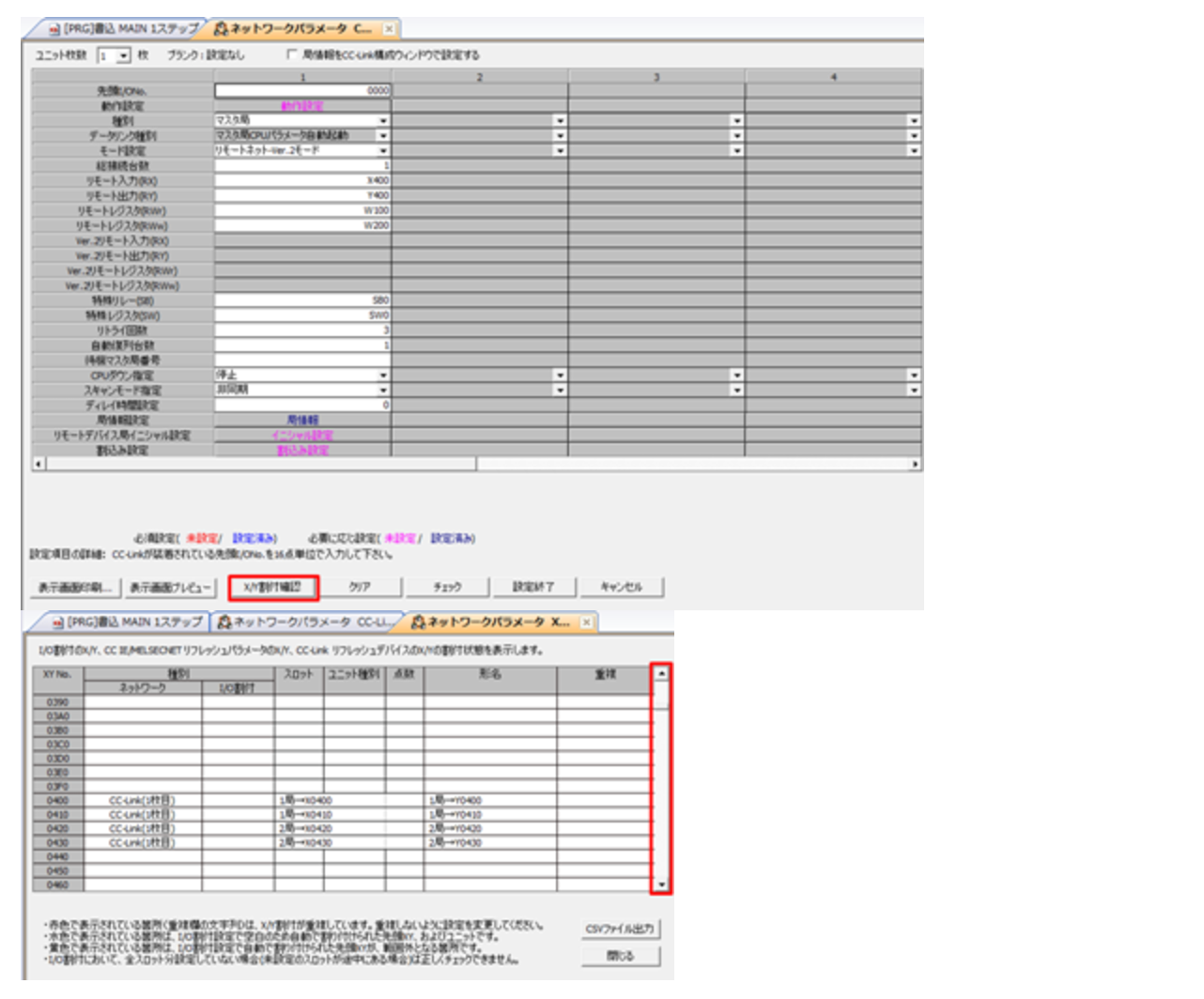
しかしワードデバイスの確認ができないので、慣れないうちは1台ずつ設定していくことをおすすめします。
次に機器②の設定を行います。
次にデバイス使用リストを表示してください。
先ほどついていた「*」がさらに増えていると思います。これは機器②を設定したためです。増えた部分が機器②の使用領域となります。
これで通信に問題なければ設定完了です。設定さえ完了してしまえば、後は簡単につかえます。
機器①の場合、「X400」〜「X43F」、「Y400」〜「Y43F」という仮想の端子台に仮想の配線がしてあると思ってください。この入出力で機器①を制御することができます。
IOについては機器それぞれで決まっていますので、機器のマニュアルを参照してください「RYn0」や「RXn0」などの表示で書いてあります。
参考までに
機器①の場合
RYn0:Y400
RY(n+2)1:Y421
機器②の場合
RYn0:Y440
となります。
参考書

秀和システム
売り上げランキング: 70,884

秀和システム
売り上げランキング: 31,176
![]()
1977年、広島県福山市生まれ。武永制御 代表。「基礎からはじめるシーケンス制御講座」管理人。◎福山職業能力開発短期大学校(制御科)を卒業。某電機会社にて設備エンジニアを務めた後、武永制御を創業。◎著作に『図解入門よくわかる最新シーケンス制御と回路図の基本』(2013年 秀和システム)、『これだけ!シーケンス制御』(2014年 秀和システム これだけ!シリーズ)がある。◎基礎からはじめるシーケンス講座 http://plckouza.com/index.html