
![]()
2017/5/3 ものづくりニュース
シーケンス制御講座「簡単な回路作成」
基礎からはじめるシーケンス制御講座
初級:簡単な回路作成
GX Developerの簡単な使い方を説明したところで、簡単な回路を製作してみようと思います。回路とはラダー図のことです。
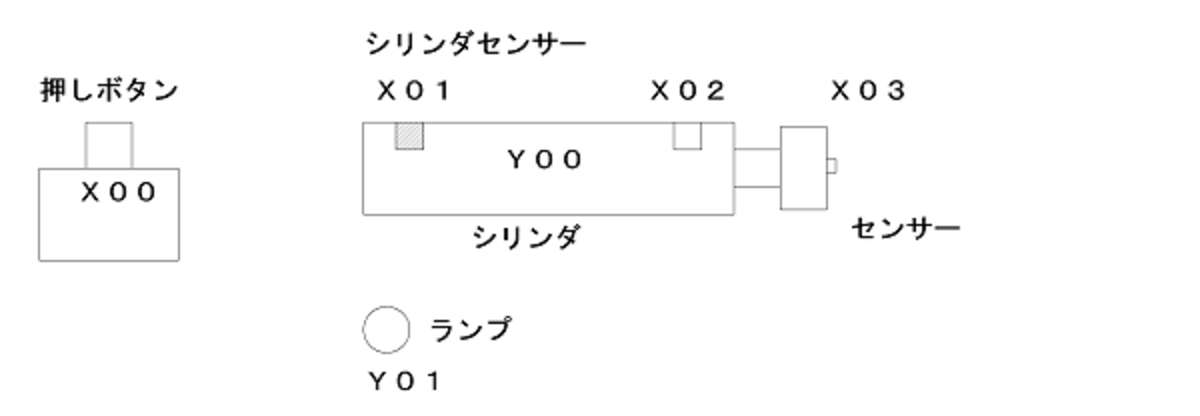
まず動作なのですが、適当に決めます。シリンダがあり、その先にセンサーがついています。
シリンダには前進端と後退端のセンサーがついています。そして押しボタンスイッチがあるとします。このシリンダを前進させ、先に物があるかどうか確認します。
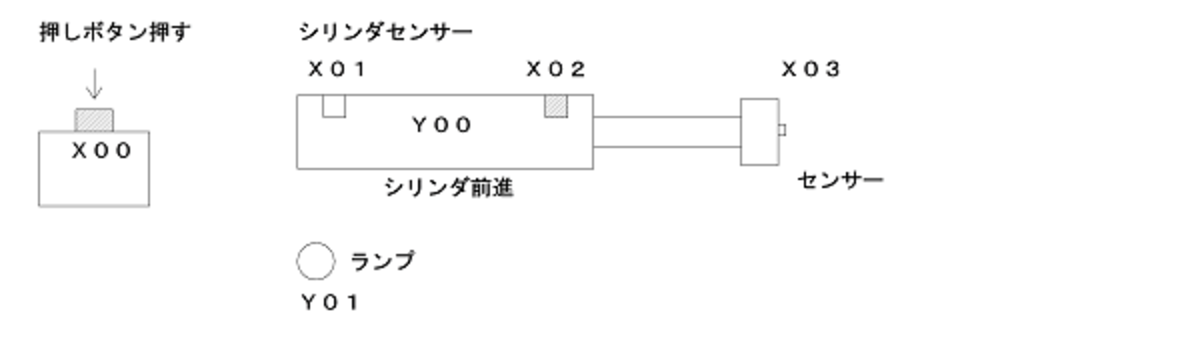
動作としては、押しボタンスイッチを押します。するとシリンダが前進します。
シリンダ前進確認はシリンダセンサーで行ないます。シリンダが前進すると「X2」が入ります。
シリンダが前進した後、シリンダの先のセンサーが反応しない場合は、そのままシリンダは後退します。
もしシリンダの前に物があった場合、シリンダ先端についているセンサーが反応します。
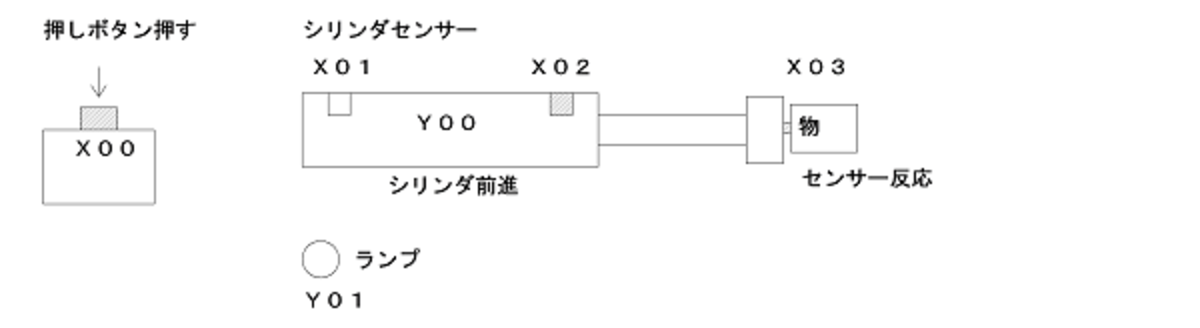
シリンダが前進して一定時間経過すると、確認終了ということでシリンダを後退させます。
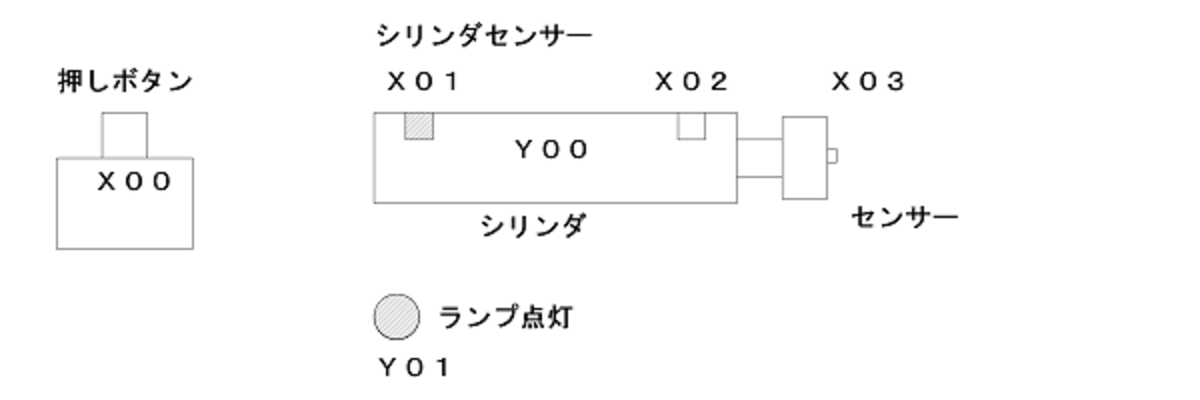
後退後、シリンダの先に物があったかどうかによってランプを点灯させます。
もし物があった場合(シリンダ先端のセンサーが反応)、シリンダ後退後1秒間ランプを点灯させます。もし何もなかった場合は点灯させません。
ここまでの動作を1つのサイクルとして、再度ボタンを押せばこの動作を繰り返す仕様にします。
ただし、ボタンを押し続けた場合は、2回目の動作をさせないようにします(押し続けていると、何回も同じ動作を繰り返すのはダメと言うことです)。
ここでのポイントは、シリンダが前進した後に、物があっても無くてもシリンダを後退させ、サイクル運転を完了させることです。
そのためシリンダ先端のセンサーを、シリンダ後退条件には使えません。
それでは回路を製作していきましょう。まずはハードの接続をしてください。ハードの接続とはPLCにセンサー等を取り付ける作業です。
ここでは説明はしませんがPLCへの配線方法で説明しています。ただし、I/Oに関しては上のイラストのように行なってください。
GX Developerを起動してプロジェクトを新規作成します。
CPUはこれから接続するCPUにしてください。ここではFXシリーズを選択してみます。
まずは前半部分を書いてみます。前半部分とはボタンを押してシリンダが前進し、後退するまでの動作です。
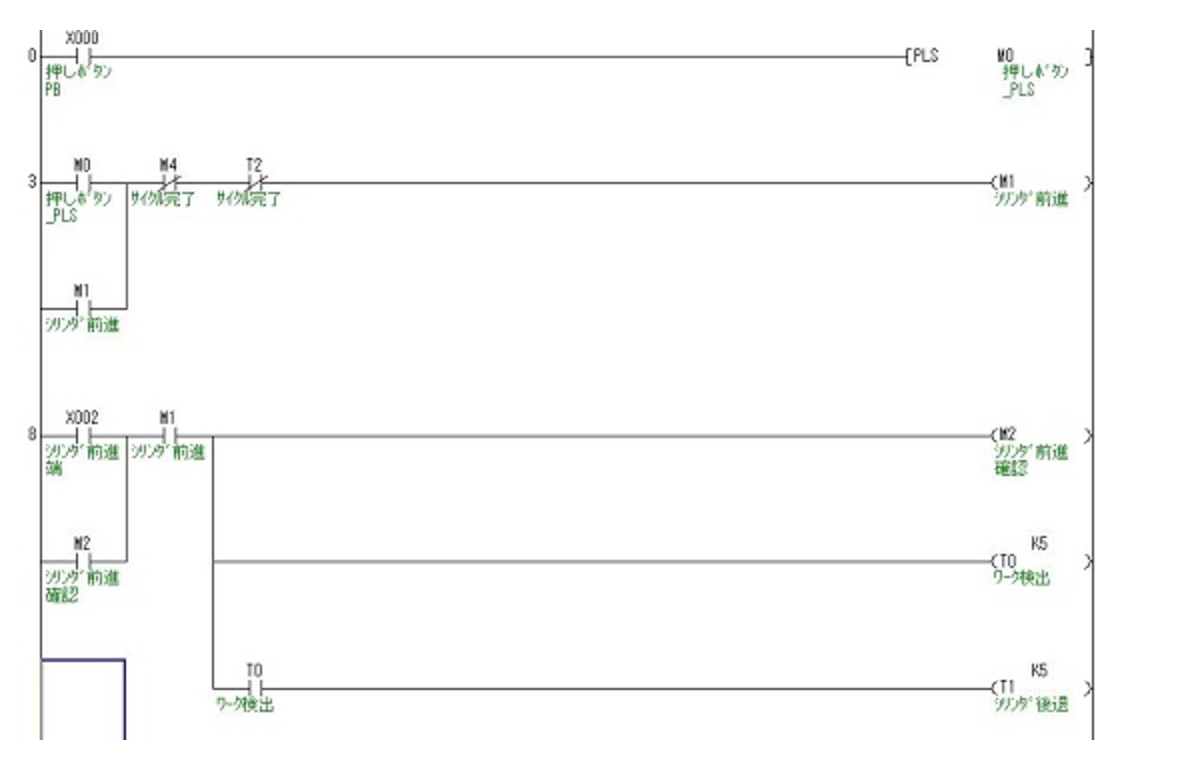
最初に「X0」という押しボタンスイッチを押すと[PLS M0]となっています。このPLSとはパルスのことで、「X0」が入った立ち上がりの1スキャンのみ「M0」がONします。
もっと簡単にいうと、「X0」を押すと押した瞬間「M0」が一瞬ONします。
これは動作条件の「ボタンを押し続けた場合は、2回目の動作をさせないようにする」の対策です。
「X0」を押し続けていても、「M0」は一瞬しか入らないため、動作が完了して再度動作させるには「X0」を一度はなしてして再度押す必要があるのです。
入力方法ですが、「F8」キーを押して、「PLS」と入力します。その後スペースを押して「M0」と入力してエンターキーを押せば完了です。
ちなみに[PLS M0]を(M0)にすると、同じように動作はしますが、押しボタンを押しっぱなしにすると、連続で動作してしまいます。
サイクルが完了する前にボタンをはなす必要があります。
[PLS M0]のように[]で囲んだ部分は特殊命令です。この場合PLSという命令を「M0」に行っています。
(M0)のように()で囲んだ部分はコイルとなります。違うので注意してください。
「M0」は一瞬しか入らないため「M1」で自己保持をかけます。「M4」と「T2」については今は無視してください。
この「M1」のコイルを利用してシリンダを前進させます。
そのため回路作成の時は「M1」はONするとシリンダが動作するとイメージしてください。
「M1」が入るとシリンダは前進するので、シリンダセンサー「X2」が入ります。次はこの「X2」を使います。
「X2」が入ると「M2」で自己保持をかけます。「M2」が入ると前進完了ということです。
このときイラストのように「M1」をいれておいてください。これは「M1」が入っているとき、つまりシリンダ前進指令が出ている状態で「X2」が入ると前進完了ということです。
こうしておかないと何らかの条件でもし「X2」が入ってしまったら、勝手に「M2」が働き、回路の途中から動作してしまうからです。
ラダー図では、基本的に上から順番に条件を設定して動作させます。このような制御を歩進制御とよびます。
「M2」がONすると同時に「T0」が入るようになっています。この「T0」はタイマーのことで、遅れて接点が動作します。
上のイラストでは「T0 K5」となっています。この部分がタイマーのコイルとなります。「T0」のコイルに回路をつなげると「T0」の接点が0.5秒後に動作します。
Kと言うのは10進数での指定です。Hと指定すると16進数となります。
タイマーの書き方なのですが、「F7」キーを押してコイルの書き込み画面にします。
そして今回は「T0」なので「T0」と入力します。その後にスペースを一回押して「k5」と入力します。これでエンターキーを押せば入力されます。
動作を説明すると、シリンダが前進して0.5秒後にシリンダ先端のセンサーでワークを確認します。「ワーク」とは対象物を指します。
「T0」の接点でワーク確認を行なって、更に0.5秒後にシリンダを後退させています。つまりワークを検出してもしなくてもシリンダは後退動作します。
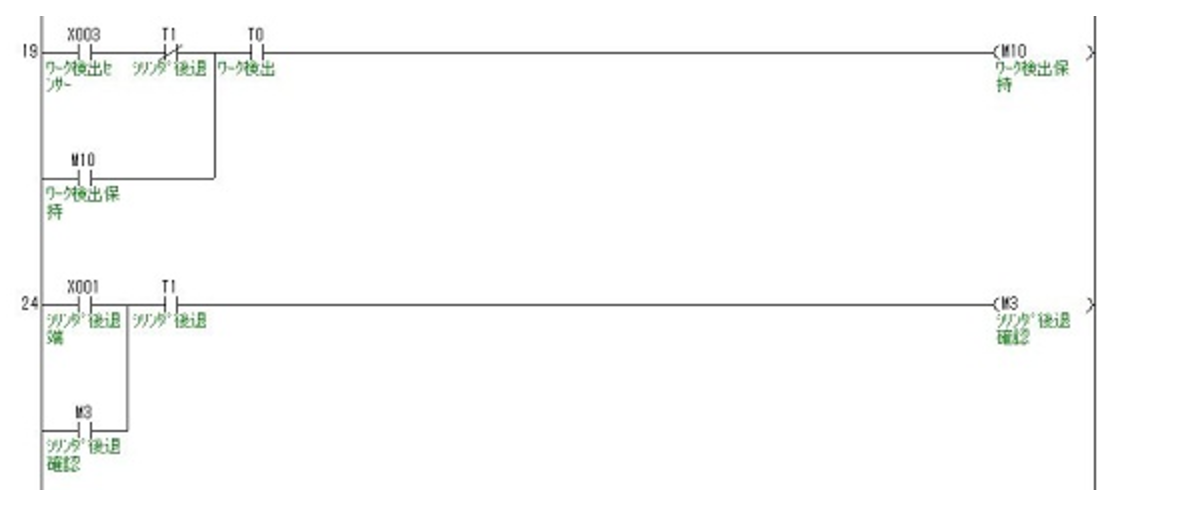
次はワークの検出部分です。シリンダ先端のセンサー「X3」がONすると「M10」で自己保持をかけます。これでワークを検出したか記憶します。
a接点で「T0」が入っています。上の回路でワーク検出を行なうタイミングです。これが無いと動作してない場合でもセンサーが反応したら自己保持してしまいます。
そしてb接点で「T1」が入っています。これは「T1」が入るタイミング、つまりシリンダが後退開始をしたらワーク検出をさせないためです。
これが無いと、シリンダ後退中にセンサーが反応してしまうと保持がかかってしまいます。
接点を入れる場所を変更すると動作が変わってしまうので、注意して変更してください。
例えば「T1」のb接点を「T0」の右側にもってくると、ワークを検出してもシリンダが後退した瞬間保持が消えてしまいます。
そして「T1」の接点によりシリンダを後退させます。このとき「X1」がONしたら「M3」で自己保持をかけます。
「T1」でシリンダを後退させた後、「X1」のシリンダ後退端がONすれば、シリンダが後退したことを確認するために「M3」をONします。
次はシリンダが後退した後の動作説明です。
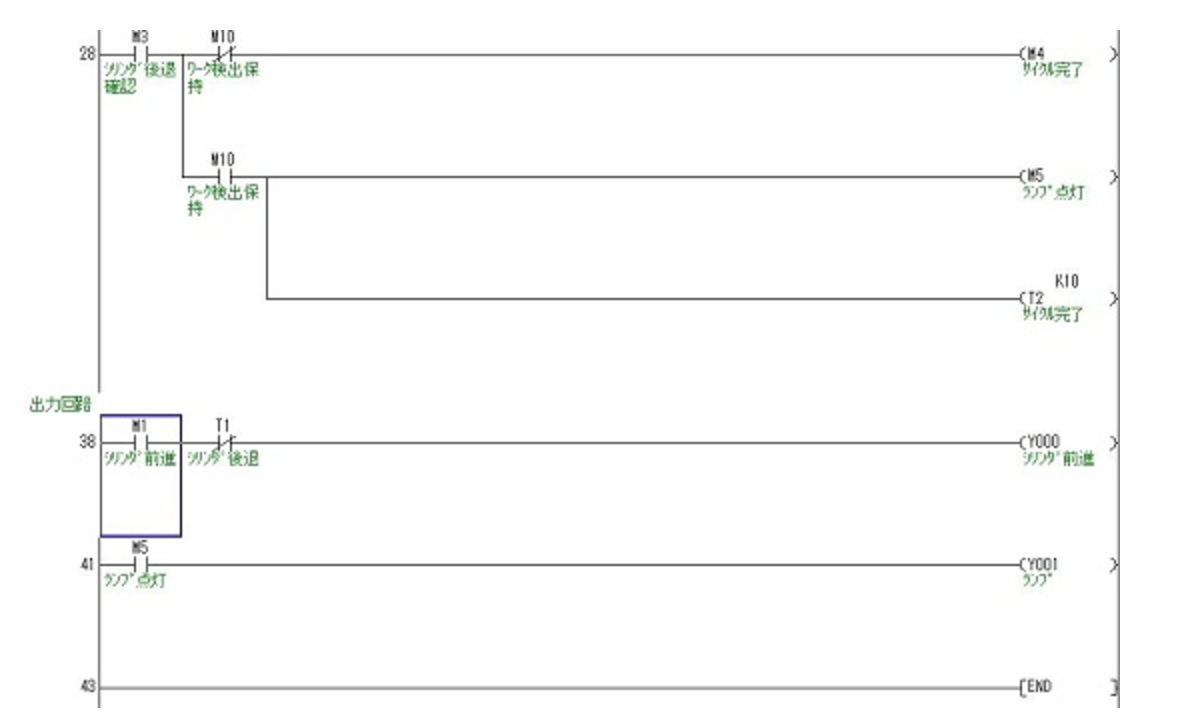
シリンダが後退完了したら「M3」が入ります。「M10」はワーク検出をした時ONしています。
まずはワーク検出をしていない場合です。「M10」は入っていないので、「M10」のb接点側の回路が働きます。
この先では「M4」がONするようになっています。
この「M4」は回路先頭の「M1」(シリンダ前進)の自己保持を切るようになっています。 つまり「M4」がONすると「M1」が切れます。
そして「M1」が切れると「M2」「T0」「T1」が切れます。さらに「M3」もきれ、動作部分の自己保持はすべて切れます。そして最初の状態に戻ります。
これがサイクル完了です。 この状態で再度押しボタンスイッチ「X0」を押すと、同じ動作を繰り返します。
ここでもし押しボタンスイッチ「X0」をパルス化していなければ、「X0」を押し続けていると何度も同じ動作をしてしまいます。
次にワーク検出をしていた場合は「M10」がONしています。つまり「M10」のa接点側の回路が働きます。
すると「M5」が入るようになっています。この「M5」でランプを点灯させます。そして1秒後に「T2」が入るようになっています。 この「T2」がサイクル停止信号になっています。
「T2」がONするとすべての自己保持が消えます。そのためランプも消灯します。これでランプが1秒点灯の回路は完成です。
最後に出力部分です。出力部分がないとシリンダも動作しません。シリンダの動作確認をしているため回路も途中で止まってしまいます。
まず「M1」がONするとシリンダ前進です。そして「T1」がシリンダ後退となっていますので、「M1」の後ろにb接点で「T1」を入れます。
つまり「M1」でシリンダは前進しますが、「T1」がONすることで「Y0」は動作しなくなります。
シリンダは後退します。ここでのシリンダはシングルソレノイドで動作させていますので、出力を切れば勝手に元に位置に戻ります。
ちなみにダブルソレノイドを使う場合は、前進信号を切った状態で後退信号を出力する必要があります。
通常ダブルソレノイドを使用する場合は、前進完了で前進信号を切ります。
最後にランプ出力です。ワーク検出した場合は「M5」が1秒間ONするようになっていますので、そのまま「Y1」に出力させるだけです。
消灯させる回路は特になく、「M5」がONした1秒後に回路全体がリセットされるので「M5」も消えます。
これで完了です。
ただしここで作った回路はとても単純な回路です。
この回路のステップ数(ラダー図の左にある数値)は50未満ですが、実際の設備になると1000~5000ステップ、複雑な演算を入れると10000ステップ程度になります。
慣れればスムーズに作成できますが、慣れるまでは時間がかかります。回路の作成方法にもよりますが、ショートカットキーを覚えて作業をするのが近道です。
接点を入力するたびにマウスに持ち替えていたら仕事になりません。すこしずつ慣れていきましょう。
ここまで初級の説明が終わりです。
最後まで読んでいただきありがとうございます。初級編での説明は、順番に説明していきましたが、中級編からは用途によって個々に説明します。
参考書

秀和システム
売り上げランキング: 70,884

秀和システム
売り上げランキング: 31,176
![]()
1977年、広島県福山市生まれ。武永制御 代表。「基礎からはじめるシーケンス制御講座」管理人。◎福山職業能力開発短期大学校(制御科)を卒業。某電機会社にて設備エンジニアを務めた後、武永制御を創業。◎著作に『図解入門よくわかる最新シーケンス制御と回路図の基本』(2013年 秀和システム)、『これだけ!シーケンス制御』(2014年 秀和システム これだけ!シリーズ)がある。◎基礎からはじめるシーケンス講座 http://plckouza.com/index.html