
![]()
2017/6/21 ものづくりニュース
シーケンス制御講座「歩進制御」
基礎からはじめるシーケンス制御講座
中級:歩進制御
シーケンス制御でラダー図を作成する場合、書き方は自由なので人によっては書き方がぜんぜん違います。
しかしいくら自由といっても書き方には基本があり、他の人にも分かりやすく書くことが重要です。
ここでは一般的な書き方を紹介します。歩進制御と呼ばれる基本的な書き方なので必ず理解してください。
まず最初に、回路を作成するにはどのような物がどのように動くか決める必要があります。説明のために私が勝手に決めます。
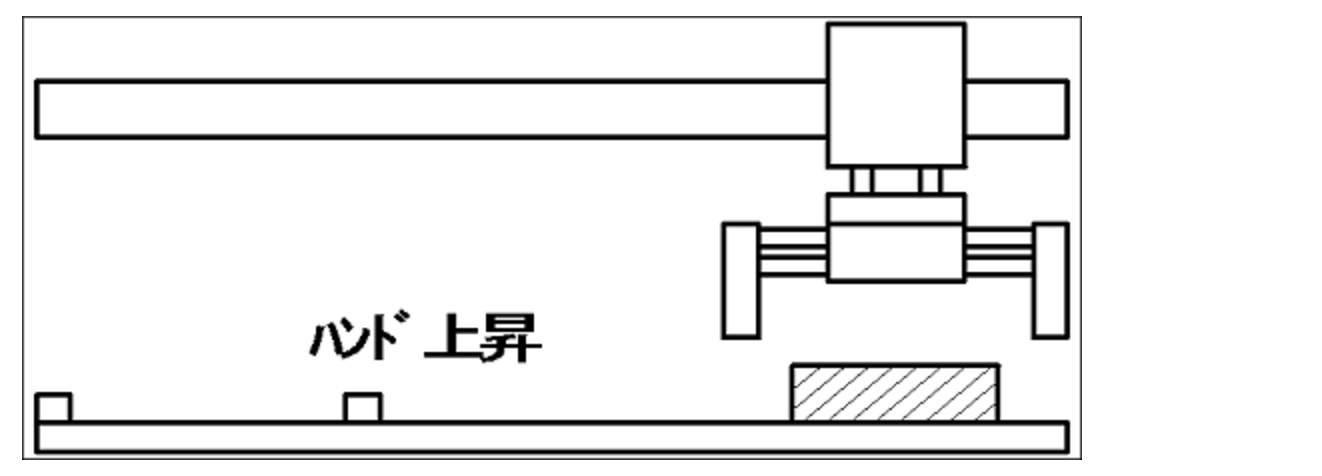
UFOキャッチャーのようなイメージで、ハンドの下にワーク(製品)が来たら、ハンドが下降して、ワークを持っていくという単純な動きにします。
ワークの検出には透過形センサーでもつけておきましょう。下のイラストのようなイメージです。
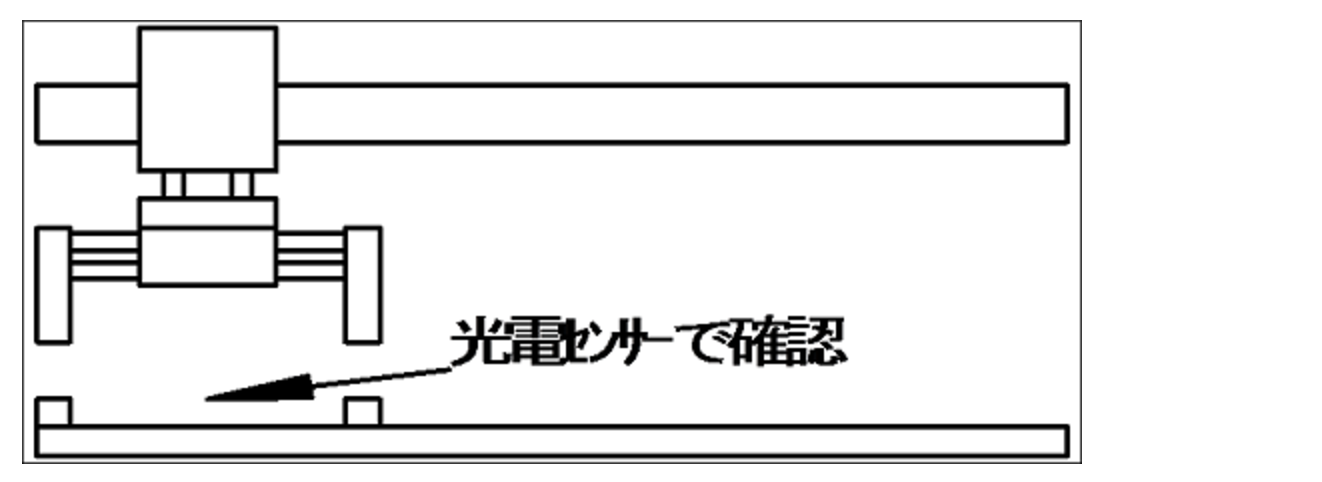
このハンドの下にワークがきます。来る方法までは設定していませんが、コンベアで搬送してきたり、他の設備から押し込まれてきたり、いろいろな方法があります。
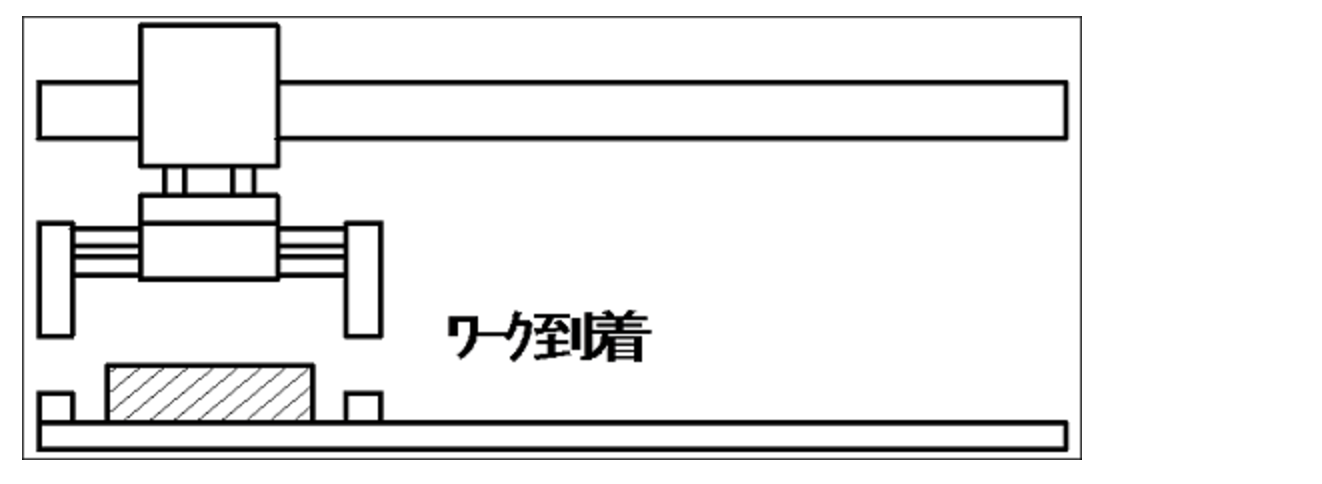
ワークが到着したら、透過形センサーが入ります。
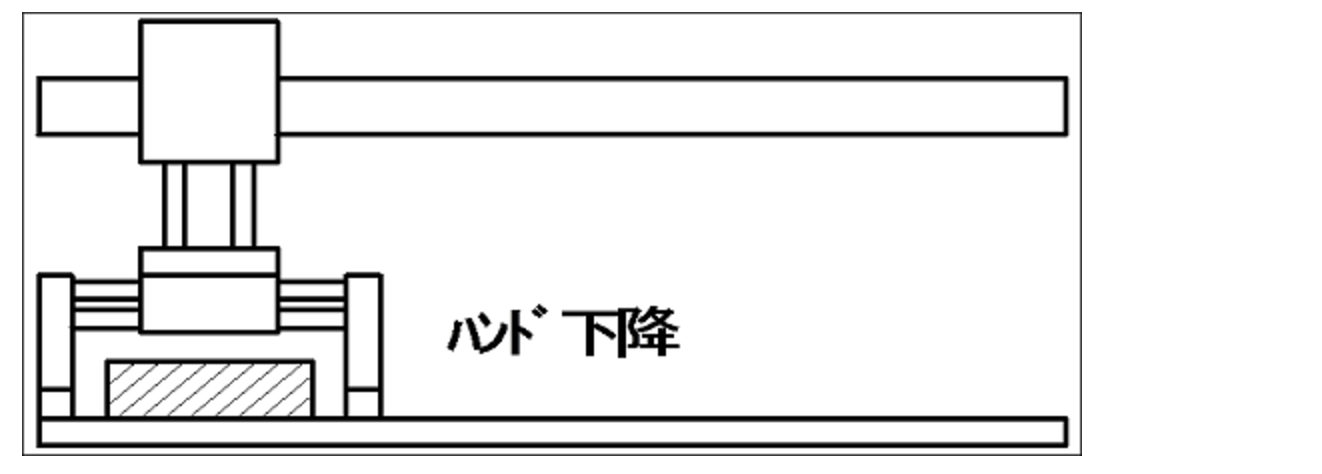
ハンドが下降してきます。
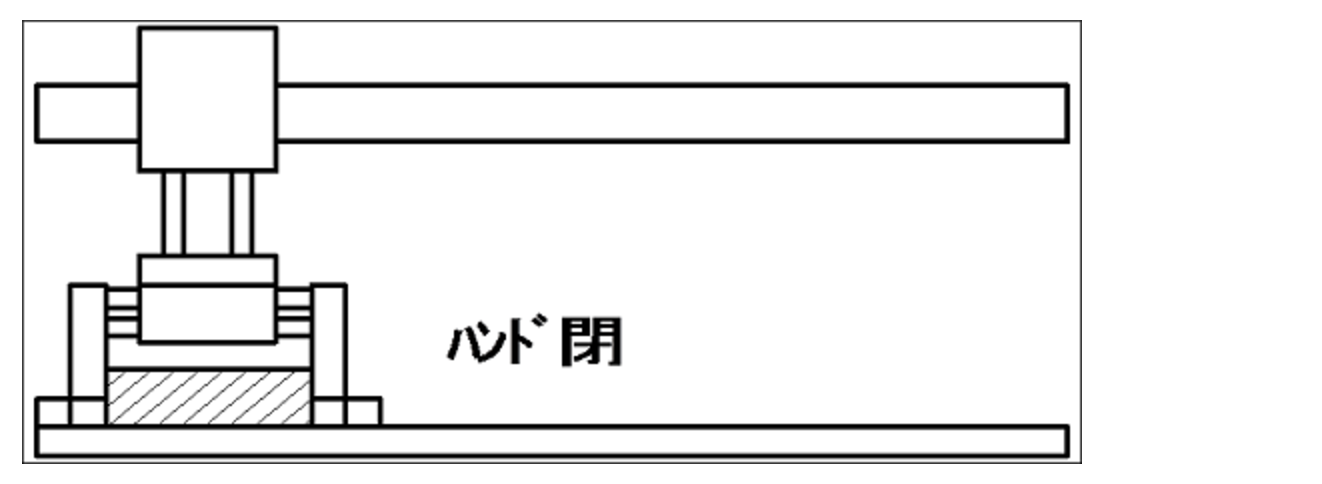
ハンドが下降完了したら、ハンドを閉じます。(ワークを掴みます)
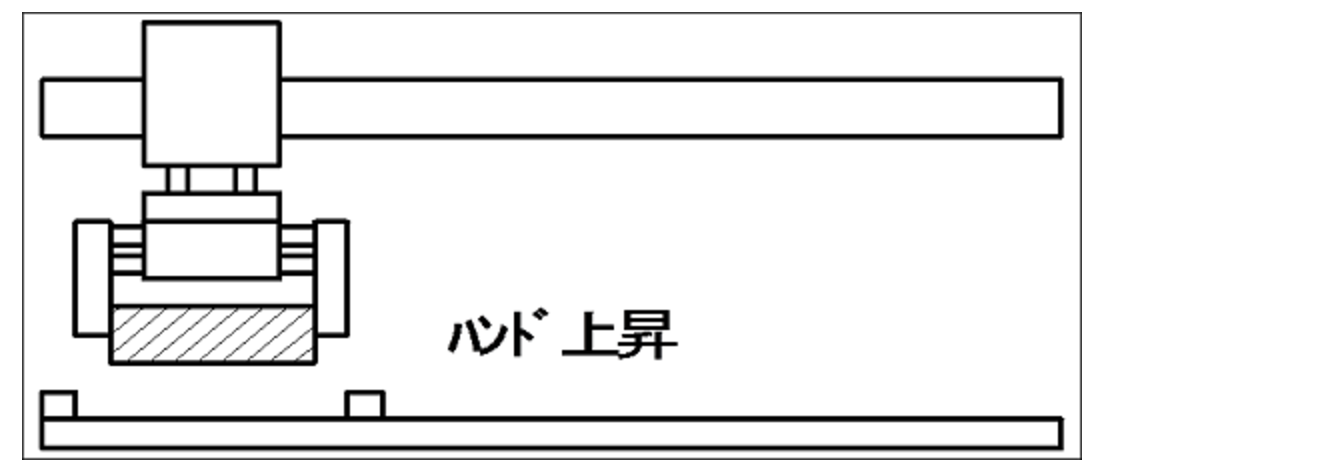
ワークを掴んだことを確認したら、ハンドを上昇させます。
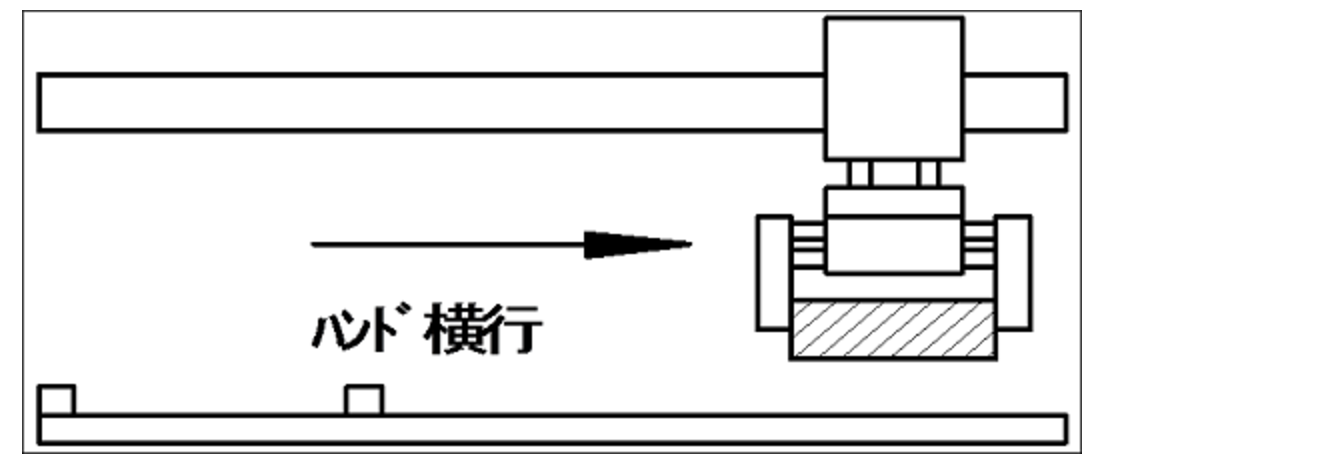
ハンドが上昇したら、ハンドを右に横移動させます。
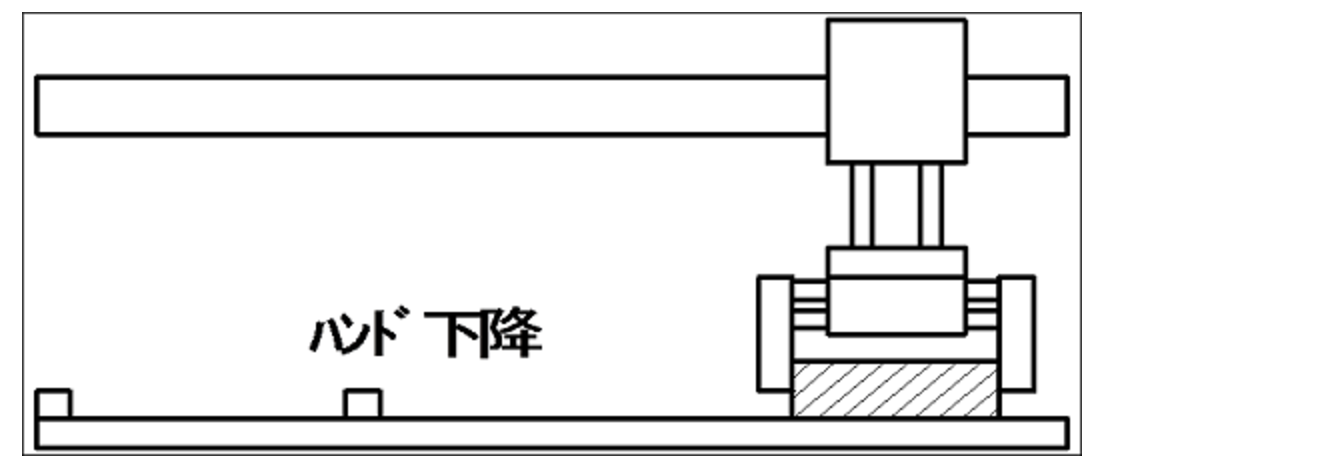
横移動が完了したら、ハンドを下降させます。
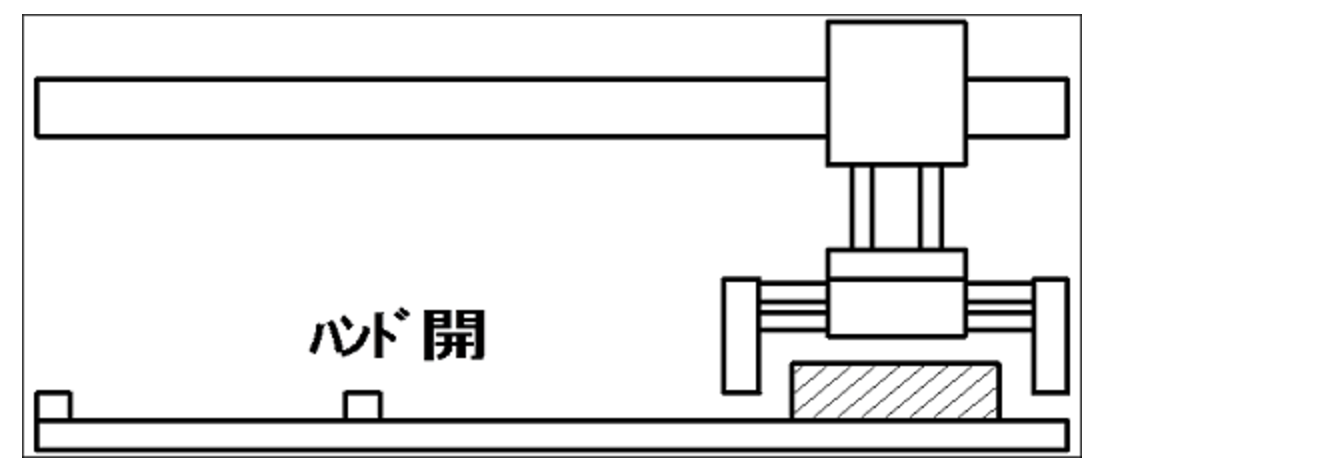
ハンドが下降したら、ハンドを開きます。
ハンドが開いたら、ハンドを上昇させます。

ハンドが上昇したら、ハンドを左に横移動させます。つまりこの時点で原点に戻ります。動きとしてはこの動作の繰り返しです。もしハンド下に次のワークがあれば、再度ワークを搬送します。
動作説明のときに、「ハンドが上昇完了したら……」のように、完了を確認する必要がありますが、こればシリンダセンサーを使用して確認します。また、今回の動作は説明用の動作なので、「フルワーク制御」(排出先にワークがあった場合排出させない)等のインターロックは一切入っていません。
ラダー図は下のイラストのようになります。順番に説明していきます。
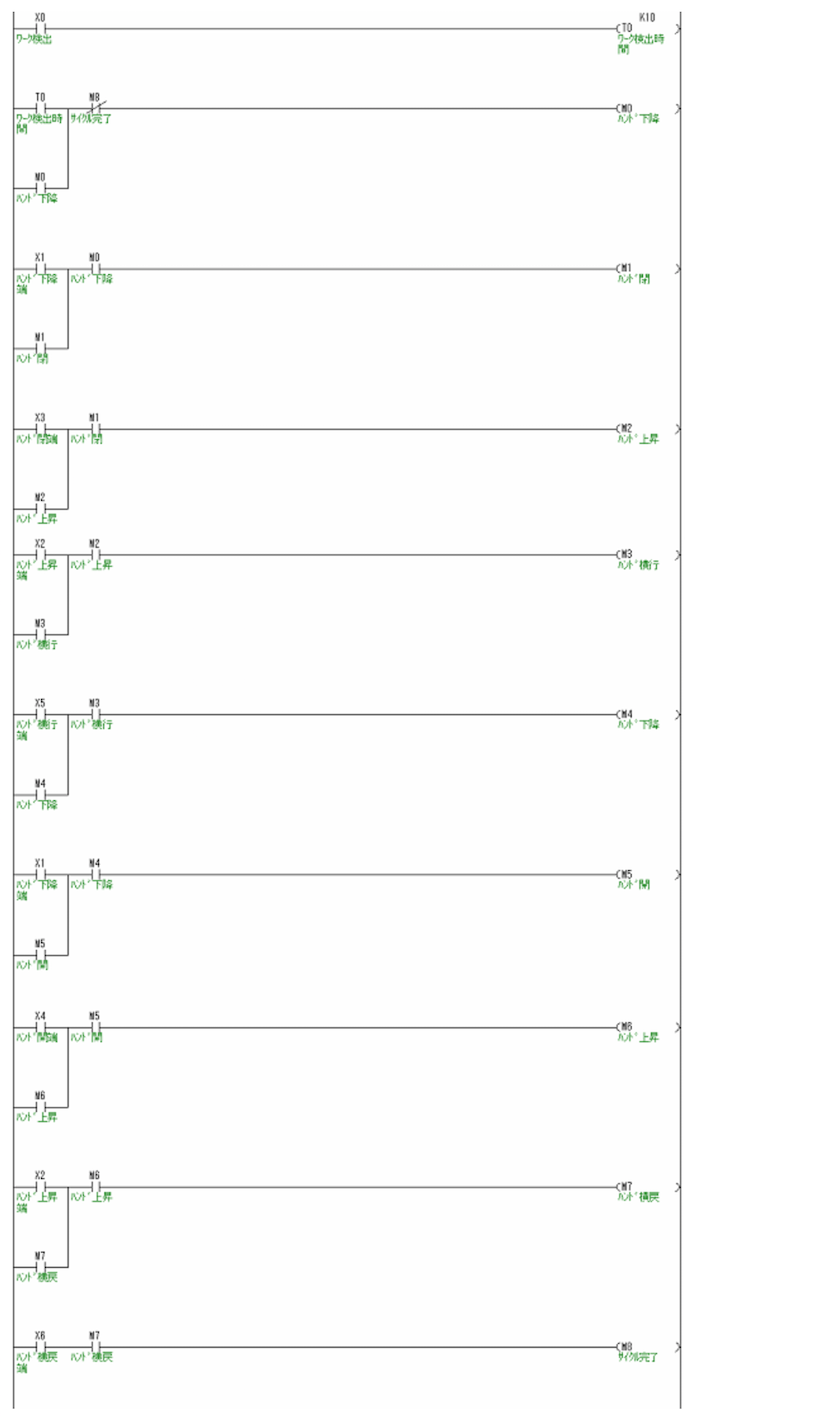
最初の「X0」でワーク検出をします。一度タイマー「T0」にしているのは、センサーが一瞬でも反応したらハンドが下降してサイクル運転が始まるのを防止するためです。
例えばコンベア等で運ばれてくる場合、ハンドの下にワークが来た時点でハンドが下降してきます。場合によってはしっかりと到着していないのでハンドで掴む可能性もあります。
中途半端な位置で掴むよりは、しっかりした位置で掴む必要があるのです。ワークが安定する時間と思ってください。
「T0」が入るとワークが到着したということで、「M0」をONします。このとき「M0」は自己保持をかけます。
「M8」がb接点で入っていますが、まだ反応していませんので問題なく自己保持はかかります。
この「M0」によって出力「Y0」をコントロールします。
次は「X1」が入ると「M1」が自己保持するようになっています。この「X1」はハンド下降端とかいてありますが、ハンドを下降させるシリンダの下降側のシリンダセンサーです。
つまりハンドが下降したら「X1」がONします。これで「M1」が入ります。この「M1」でハンドを閉じる出力を出せばいいのです。その前に自己保持の条件に「M0」が入っていますね?
これは最初の工程でハンドを下降させたときにのみ自己保持をかけるという意味です。こうしておかないと別のプログラムや、手動でハンドを下降させた時にも動作をしてしまいます。
つまりワークを検出→ハンドを下降→この後にしか入らないようにしているわけです。
このように一つの動作に対して自己保持をかけていき、次の動作の自己保持の条件にするのです。
こうすることで順番にしか動作をしない、一定の動作しかしないということになります。
その後の回路も書き方は全く同じなので説明は省略します。一つ一つの動作を順番に書いていっているだけです。
内部コイルのアドレスも順番になっていますが、これはきれいに並べているだけです。もし、完成した回路で後から動作を追加する場合は、ダブルコイルさえしなければ特にアドレスの順番は関係ありません。
間に回路を挿入するのは簡単ですが、アドレスを書き直すのは大変です。
最後の行の説明をします。最後は製品を置いたあとハンドが上昇してハンドを元の位置に戻します。
ここで「X6」が入るとハンドがもとの位置に戻ります。すると「M8」がONします。この後はありません。
この「M8」はこの動作の一番最初にある「M0」の自己保持の条件です。「M8」が入れば「M0」の自己保持は解除されます。すると次の「M1」も解除され、さらに次も解除され、最終的にはすべての自己保持が解除されます。これが基本的な書き方となり、一般的に歩進制御と呼ばれています。
補足として最後の「X6」という条件、すべてのシリンダセンサーを使用するほうが安全です。設備を作るときは必ず全原点復帰の信号を作るはずです。
これは単純に各シリンダセンサーの原点側をANDで結んで(回路図上は直列にということです)最後に内部リレーに出力します。例えば全原点のときに「M10」がONするようにします。
上の回路に戻って、最後の「X6」の部分を「M10」に変更すれば、全原点でサイクル完了となります。動きは同じですが安全のためにこのようにすることもあります。
この状態では出力がないので、動作しません。次は出力の設定です。
シリンダのソレノイドを、ダブルを使うかシングルを使うかによって回路の書き方は変わってきます。まずはシングルソレノイドの場合です。
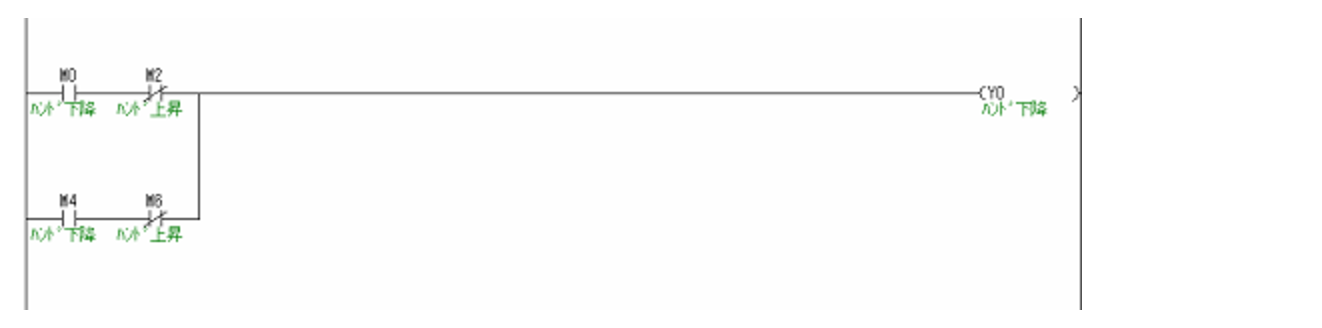
ングルソレノイドとは、ソレノイド(電磁弁)に1個しかコイルがついていません。そのコイルに出力すれば電磁弁は動作します。
そして出力をとめれば動作もとまります。つまり「Y0」を出力すればシリンダは下降しますが、「Y0」を切るとシリンダは上昇します。
I/Oが少なくなるメリットはありますが、突然電気系統が壊れたら、一気にシリンダが原点に戻るという危険性もあります。
出力はまず「M0」が入ると出力します。そして「M2」はハンド上昇の部分なので、b接点をいれておけば「Y0」の出力は切れます
ワーク搬送先でも同じように「M4」で出力させて「M6」で切っています。このように出力させていきます。他の出力も同じように行います。
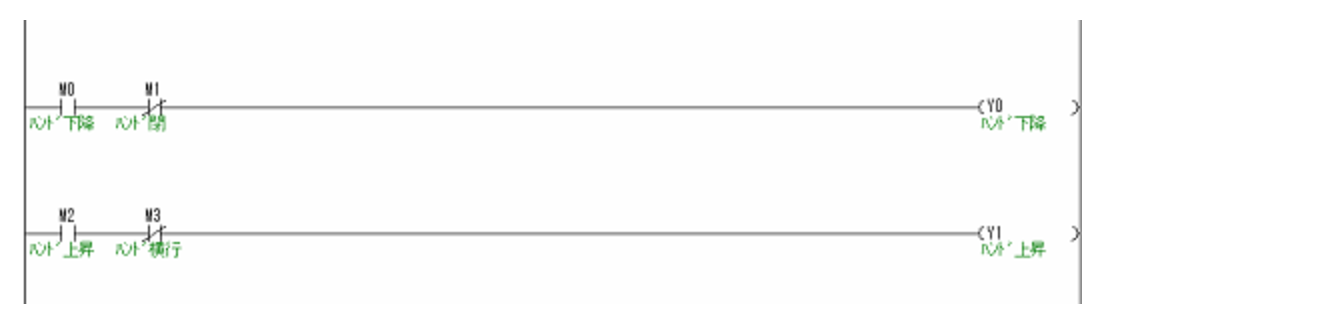
次はダブルソレノイドです。これはソレノイド(電磁弁)に2個のコイルがついています。片方のコイルに出力すれば動作しますが、出力を切っても戻りません。
つまり「Y0」でシリンダを下降させ、「Y0」の出力を切ってもシリンダは上昇しません、上昇させるには「Y1」を出力する必要があります。
I/Oが倍になりますが、電気系統が壊れても、勝手にシリンダが戻らないため安全性の面では有利です。ストロークの多いシリンダには基本的にダブルソレノイドを使用します。
回路の出力は少し違います。「M0」でハンドを下降させたら、下降完了の時点で出力は切ります。作る人によって違いますが、0.5秒ほど出力させて切る方もいます。上昇させる場合も同じです。
今回の回路では書いていませんが、ダブルソレノイドの場合、同時に出力は厳禁です、上の出力図で説明すると、b接点の「M1」の後ろにb接点の「Y1」をつけます。
そしてb接点の「M3」の後ろにb接点の「Y0」をつけます。これでお互いにロックをかけるのです。このような動作をインターロックと呼びます。
参考書

秀和システム
売り上げランキング: 70,884

秀和システム
売り上げランキング: 31,176
![]()
1977年、広島県福山市生まれ。武永制御 代表。「基礎からはじめるシーケンス制御講座」管理人。◎福山職業能力開発短期大学校(制御科)を卒業。某電機会社にて設備エンジニアを務めた後、武永制御を創業。◎著作に『図解入門よくわかる最新シーケンス制御と回路図の基本』(2013年 秀和システム)、『これだけ!シーケンス制御』(2014年 秀和システム これだけ!シリーズ)がある。◎基礎からはじめるシーケンス講座 http://plckouza.com/index.html