
![]()
2017/6/28 ものづくりニュース
シーケンス制御講座「ステップ制御」
基礎からはじめるシーケンス制御講座
中級:ステップ制御
ステップ制御の説明です。今回は歩進制御で説明した動作と全く同じ動作を行います。ただし、ラダーの書き方は自己保持を連続で使用する方法は行いません。
データレジスタの中に数値をいれ、その数値によって制御を行います。ただし初心者の方にはお勧めできません。歩進制御で説明した自己保持を使用する方法を確実に理解してから行ってください。
回路は下のようになります。今回はシーケンサの機種をQシリーズにしたので、最初に出てくる「SM400」は常時ONの接点です。FXシリーズでいう「M8000」と同じです。
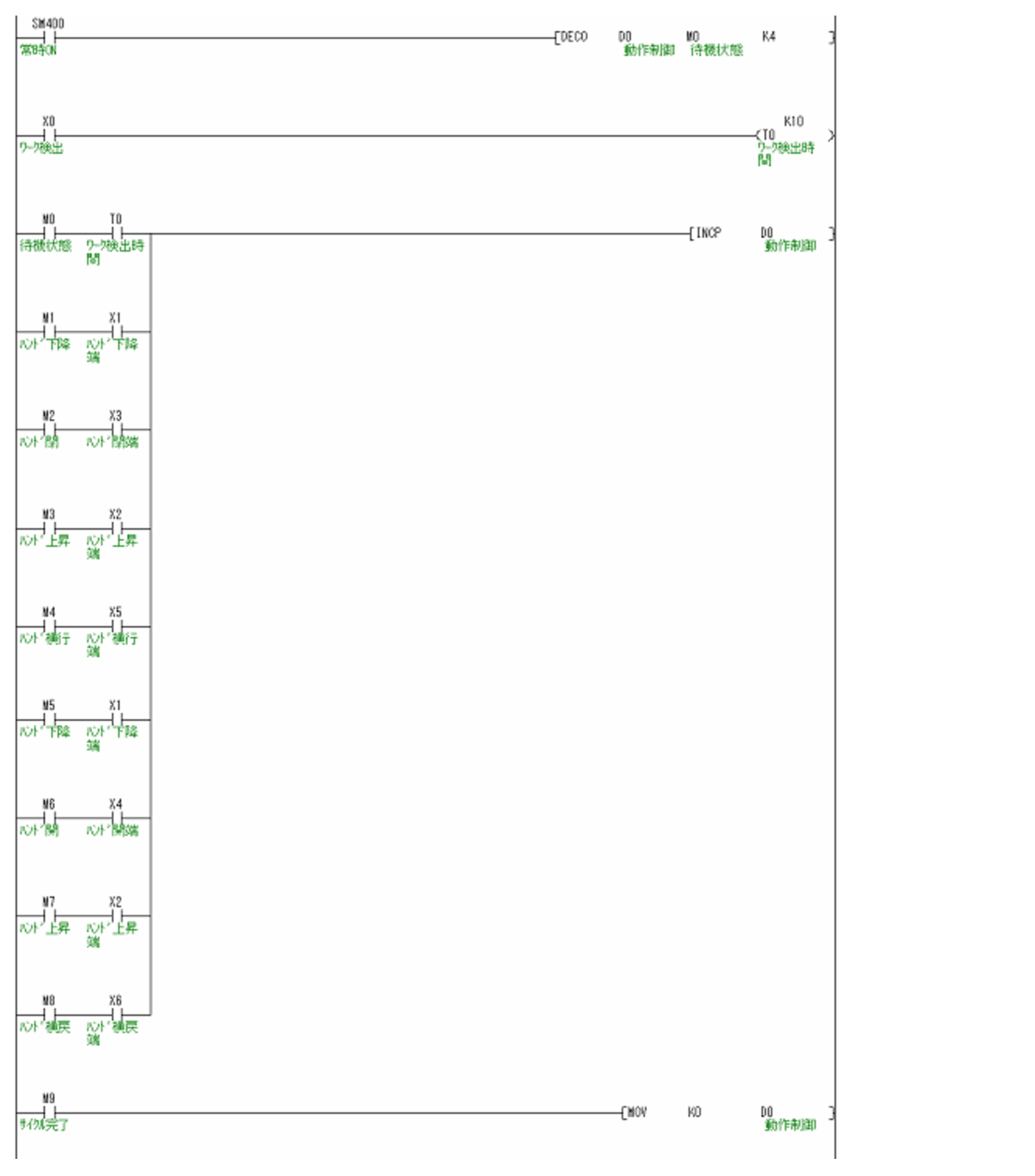
まず最初に[DECOD0M0k4]と出てきました。今回の制御の一番重要な部分です。これは「DO」の中の値にあわせて「M0」~に出力しなさいという命令です。
「D0」の値が0なら「M0」がONします。「D0」の値が3なら「M3」がONします。ただし上限がありK4というのは2の4乗で16。つまり「M0」から16点を使います。
これがないと内部リレーが勝手にONしてしまいます。私はこの制御を使用するときは内部リレーを100点使います。最初はK4で動作させ、制御が増えてくるとK5にします。
次の「T0」は歩進制御で説明したことと同じです。そして[INCPD0]となっています。これは「D0」の値を1ずつ増やしています。
最初は「D0」の値は0なので「M0」が入っています。その状態でワークが到着すると「T0」がONします。「T0」が入ると[INCPD0]が入り、「D0」に1を加えます。
「D0」1になるので、「M0」はOFFして、「M1」がONします。この「M1」をハンド下降出力に使います。今度は「X1」が入ると「D0」が1増えます。すると「M2」がONします。この繰り返しです。
すべての工程が終了したら「M9」が入ります。「M9」が入ると強制的に「D0」の値を0にします。これで回路のリセットは完了です。
次は出力部分です。
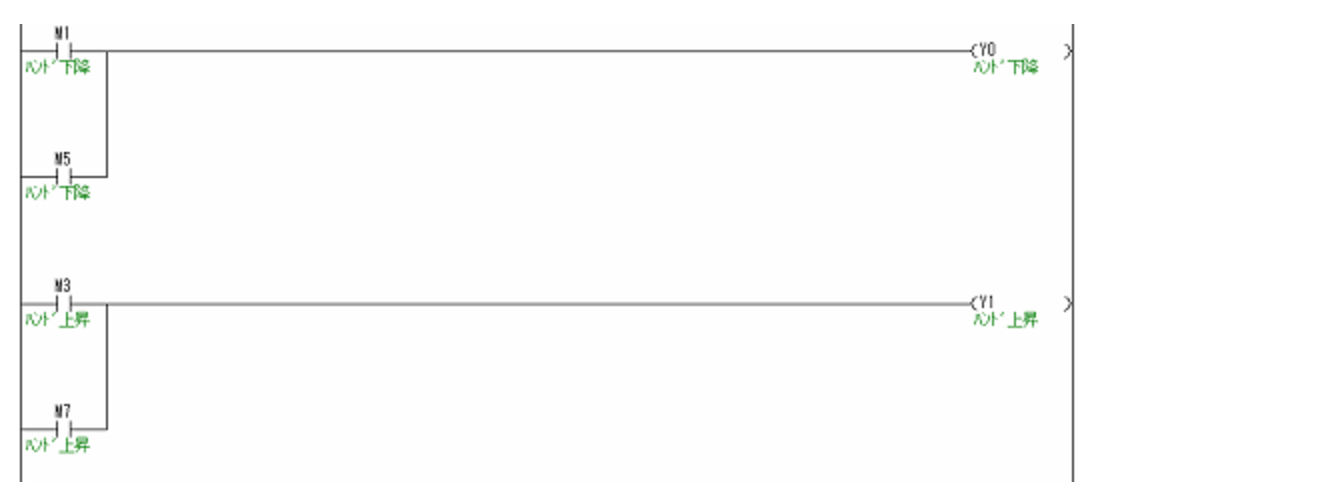
まずはダブルソレノイドの場合です。自己保持の制御のように内部コイルが入りっぱなしにならないので、切る必要はありません。単純な回路になります。
次はシングルソレノイドの場合ですが、少し工夫が必要です。
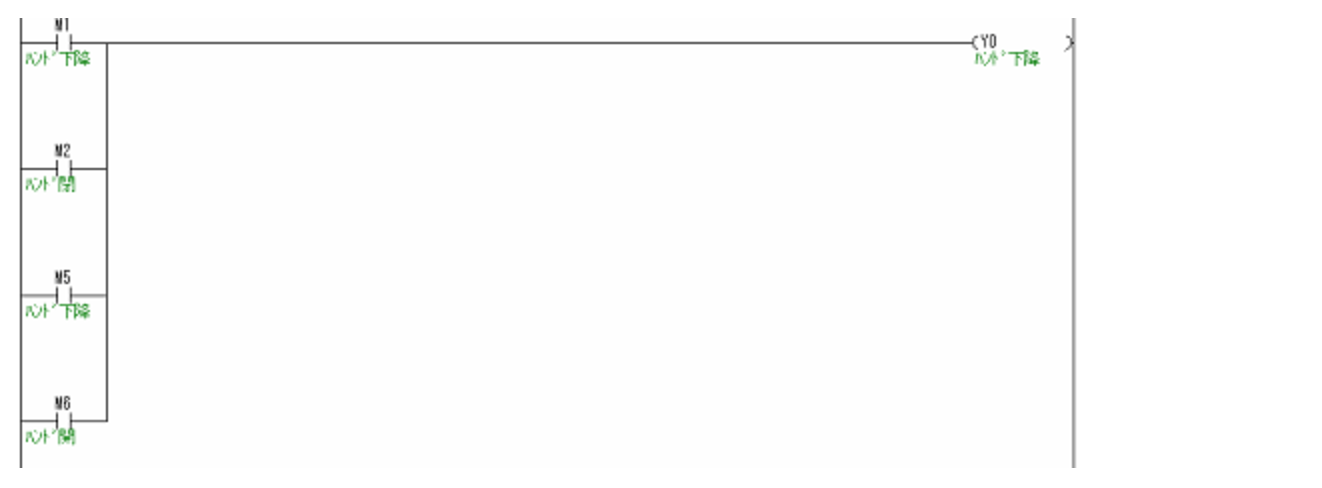
「M1」と「M2」などが同時に入ることはありません。そのため「M1」のみで動作させておくとハンドが閉じた瞬間上昇してしまいます。そのためハンドが閉じる動作「M2」でも下降状態を保持する必要があります。動作工程が多いと下に長くなってしまいます。
[
こんな感じで範囲指定する方法がシンプルです。
この書き方、どのようなメリットがあるかというと、書き方が動作内容の接点を並べてその横に動作完了条件の接点を並べるだけなので、作成が早い。
そして一番のメリットは、現在の動作位置が数値として扱える。GOT(タッチパネル)のコメントと連動させれば、現在の動作状況をGOT上に表示させることはとても簡単。
設備異常で停止したときも、停止位置が数値で扱えるので、その後の対応が簡単です。ただしメリットばかりではなくデメリットもあります。
それは後から動作回路の間に別動作を追加することです。色々な追加方法がありますが、回路を書き直さない限りきれいな回路にはなりません。
参考書

秀和システム
売り上げランキング: 70,884

秀和システム
売り上げランキング: 31,176
![]()
1977年、広島県福山市生まれ。武永制御 代表。「基礎からはじめるシーケンス制御講座」管理人。◎福山職業能力開発短期大学校(制御科)を卒業。某電機会社にて設備エンジニアを務めた後、武永制御を創業。◎著作に『図解入門よくわかる最新シーケンス制御と回路図の基本』(2013年 秀和システム)、『これだけ!シーケンス制御』(2014年 秀和システム これだけ!シリーズ)がある。◎基礎からはじめるシーケンス講座 http://plckouza.com/index.html